Exact Constraint Design Using Tolerance Analysis Methods
Exact Constraint Design Using Tolerance Analysis Methods. Danny Smith Brigham Young University 15 June 2001. Special Acknowledgements to: ADCATS Research NSF Grant DMI 0084880. ADCATS 2001. Presentation Outline. Background Constraint Analysis and Screw Theory Tolerance Analysis

Exact Constraint Design Using Tolerance Analysis Methods
E N D
Presentation Transcript
Exact Constraint Design Using Tolerance Analysis Methods Danny Smith Brigham Young University 15 June 2001 Special Acknowledgements to: ADCATS Research NSF Grant DMI 0084880 ADCATS 2001
Presentation Outline • Background • Constraint Analysis and Screw Theory • Tolerance Analysis • Variation-based Constraint Analysis of Assemblies (VCAA) Method • Case Studies • Conclusion
Why Analyze for Constraints? • Key Definitions: • Degrees of Freedom • Exact-constraint • Overconstraint • Underconstraint
Overconstraint or Redundant DOF Underconstraint or Idle DOF Common Assembly Problems
Current Constraint Methods • Kinematic Constraint Pattern Analysis • [Blanding 1999] • Geometric Constraint Solving • [Hoffmann and Vermeer 1995] • Screw Theory-Based Constraint Analysis • [Adams 1998], [Konkar 1993], and [Adams and Whitney 2001]
Screws – Twists and Wrenches Wrench Twist Please see [Adams and Whitney 2001] for details
Fundamental Principles • Reciprocity of twists and wrenches • Screw coordinate representation • Virtual coefficient • Solve for twistmatrix and wrenchmatrix
Screw Theory Steps 1. Locate mating features on assembly using transformation matrices. 2. Form Twist matrices for each mating feature 3. Use screw algorithms and linear algebra to solve for Resultant Twist and Resultant Wrench matrices Please see [Adams and Whitney 2001] for details
DOF Analysis Example • Individual feature screw representation • Algorithms • Resultant Twistmatrix and Wrenchmatrix • Interpretation Taken From [Adams and Whitney 2001]
Example (Cont.) • Assembly DOF and Constraint Solution Taken From [Adams and Whitney 2001]
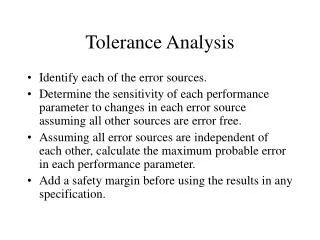
Tolerance Analysis Background • Dimensional, Kinematic, and Geometric Variation • Direct Linearization Method (DLM) • Vector Loops • Global Coordinate Method (GCM) Please see [Chase 1999] and [Gao 1993] for complete details
Direct Linearization Method • Manufactured or Independent variables • Assembly or Dependent variables • Geometric Feature variables
Vector Loops and GCM • A Matrix • Independent Variable Sensitivity Matrix • B Matrix • Dependent Variable Sensitivity Matrix • F Matrix • Geometric Feature Variable Matrix • Sensitivities are determined by the GCM
Development of the Variation-based Constraint Analysis of Assemblies (VCAA) Method • Variation analogies • Velocity • Force and moments • GCM connection • Employs screw theory • Solves for under- and overconstraints underconstraint information [B] [F] overconstraint information
VCAA for Underconstraints T B [ ] T column i joint DLM Tolerance Analysis Transpose and Switch Associate Dependent Variables to Joint Types W W T i j intermediate-joint intermediate-part j Resultant-part Reciprocal Operation Union Matrices For Each Part Reciprocal Operation
VCAA for Overconstraints W F W [ ] column joint i DLM Tolerance Analysis Transpose Associate Geometric Feature Variables to Joint Types W T or or j j intermediate-part Resultant-part T T W intermediate-joint i k intermediate-loop k Resultant-loop Union Matrices For Each Part or Loop Reciprocal Operation Reciprocal Operation
Case Studies of VCAA • Case 1 - One-way Clutch Assembly in 2-D • Case 2 - Stacked Blocks Assembly in 2-D • Case 3 - Crank Slider Assembly in 3-D
Case 1 - One-Way Clutch Assembly • Transmits torque in one rotational direction • Assembly formed from Roller, Hub, and Ring • Pressure Angle 1 is the key dimension
Case 1 - Sensitivity Matrices • Sensitivity Matrices Calculated using GCM
Case 1 - Underconstraint Analysis • Form Joint Twists for each joint from [B] • Perform intermediate steps • See [Adams 1998] • Evaluate Resultant Twist for each part to identify underconstraint information
Case 1 - Underconstraint Solution and Results • Resultant Twists for each part show any underconstrained degrees of freedom
Case 1 - Overconstraint Analysis • Form Joint Wrenches for each joint from [F] • Perform intermediate steps • See [Adams 1998] • Evaluate Resultant Wrench for each part to identify overconstraint information
Case 1 - Overconstraint Solution and Results • Resultant Wrench for each set shows any overconstrained degrees of freedom
Case 2 – Stacked Blocks Assembly • Theoretical assembly for tolerance analysis • Assembly formed from Base, Block, and Cylinder • Vertical placement A of cylinder is key dimension • Three Vector Loops needed
Case 2 - Sensitivity Matrices • Sensitivity Matrices Calculated using GCM
Case 2 - Sensitivity Matrices • Sensitivity Matrices Calculated using GCM
Case 2 - Underconstraint Analysis • Form Joint Twists for each joint from [B] • Perform intermediate steps • See [Adams 1998] • Evaluate Resultant Twist for each part to identify underconstraint information
Case 2 - Underconstraint Solution and Results • Resultant Twists for each part shows any underconstrained degrees of freedom
Case 2 - Overconstraint Analysis • Form Joint Wrenches for each joint from [F] • Perform intermediate steps • See [Adams 1998] • Evaluate Resultant Wrench for each part to identify overconstraint information
Case 2 - Overconstraint Solution and Results • Resultant Wrench for each set show any overconstrained degrees of freedom
Case 3 – Crank Slider Assembly • Assembly formed from Base, Crank, Link, and Slider • Slider Position U is the key dimension • One Vector Loop needed
Case 3 - Sensitivity Matrices • Sensitivity Matrices Calculated using GCM
Case 3 - Sensitivity Matrices • Sensitivity Matrices Calculated using GCM
Case 3 - Underconstraint Solution and Results • Resultant Twists for each part show any underconstrained degrees of freedom
Case 3 - Overconstraint Solution and Results • Resultant Wrench for each set shows any overconstrained degrees of freedom
Conclusions • VCAA Method connects Constraint Analysis and Tolerance Analysis • Based on Screw Theory and the Global Coordinate Method • The VCAA Method can extract twist and wrench matrices directly from the vector model • Can perform a constraint analysis and a tolerance analysis simultaneously
Bibliography • Adams, Jeffrey D. Feature Based Analysis of Selective Limited Motion in Assemblies. Master of Science Thesis, Massachusetts: Massachusetts Institute of Technology, 1998. • Adams, Jeffrey D.; Whitney, Daniel E. “Application of Screw Theory to Constraint Analysis of Mechanical Assemblies Joined by Features.” In Journal of Mechanical Design: Transactions of the ASME, Vol. 123, pp. 26-32, March 2001. • Blanding, Douglass L. Exact Constraint: Machine Design Using Kinematic Principles. New York: ASME Press, 1999. • Chase, Kenneth W. Dimensioning & Tolerancing Handbook, ed. Paul J. Drake, Jr., New York: McGraw Hill,“Multi_Dimensional Tolerance Analysis.”, 1999.
Bibliography (cont.) • Chase, Kenneth W.; Gao, Jinsong; Magelby, Spencer; Sorensen, Carl. “Including Geometric Feature Variations in Tolerance Analysis of Mechanical Assemblies.” In IIE (Institute of Industrial Engineers) Transactions, Chapman & Hall Ltd., pp. 795_807, 10 Oct 1996. • Gao, Jinsong; Chase, Kenneth; Magleby, Spencer. “Generalized 3-D Tolerance Analysis of Mechanical Assemblies with Small Kinematic Adjustments.” In IIE (Institute of Industrial Engineers) Transactions,Chapman & Hall Ltd, pp. 367_377, 4 April 1998. • Gao, Jinsong; Chase, Kenneth; Magleby, Spencer. “Global Coordinate Method for Determining Sensitivity in Assembly Tolerance Analysis” in Proceedings of the ASME International Mechanical Engineering Conference and Exposition, Anaheim, California, 1998
Bibliography (cont.) • Gao, Jinsong. Nonlinear Tolerance Analysis of Mechanical Assemblies. A Doctor of Philosophy Dissertation, Provo, Utah: Brigham Young University, August 1993. • Hoffmann, Christoph; Vermeer, Pamela. Computing in Euclidean Geometry (2nd Edition), ed. Du, Ding-Zhu; Hwang, Frank, Singapore: World Scientific Publishing Co. Pte. Ltd., “Geometric Constraint Solving in U2 and U3.”, pp. 266-298, 1995. • Konkar, Ranjit. Incremental Kinematic Analysis and Symbolic Synthesis of Mechanisms. Doctor of Philosophy Dissertation, Palo Alto, California: Stanford University, June 1993. • Konkar, Ranjit; Cutkosky, M. “Incremental Kinematic Analysis of Mechanisms.” In Journal of Mechanical Design, Vol. 117, pp. 589-596, December 1995.
Bibliography (cont.) • Roth, Bernard. “Screws, Motors, and Wrenches that Cannot be Bought in a Hardware Store.” In Robotics Research, Chapter 8, pp 679-693, 1984. • Waldron, K. J. “The Constraint Analysis of Mechanisms.” In The Journal of Mechanisms, Volume 1, pp 101-114. Great Britain: Pergamon Press, 1966.