Laser Spot Detection Algorithm for Image Analysis
Analyzing images pixel by pixel to detect the brightest spot as the laser point. Implementing various algorithms to identify the correct pixel location amidst noise.

Laser Spot Detection Algorithm for Image Analysis
E N D
Presentation Transcript
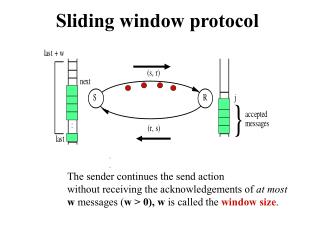
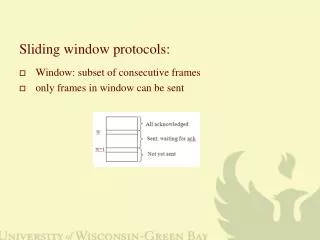
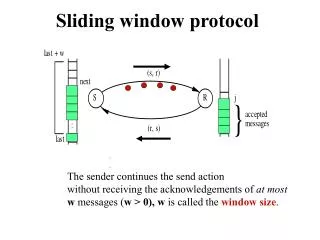
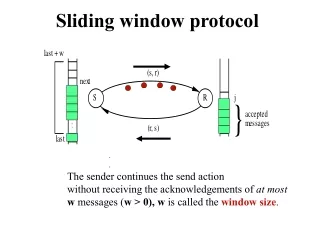
Image being written to memory one pixel at a time CurrentPixel Data0 Data1 >250 >250 Brightest Pixel in the middle of two pixels > 250. Sliding window of three pixels being analyzed. Testing the middle pixel for being the laser spot. Sliding window Color Key: Grey pixels – already written to memory White pixel – current pixel being written to memory Red pixel – pixel written to memory last clock cycle, but is the pixel that is being analyzed as the brightest pixel LaserSpot Algorithm Analysis
Image being written to memory one pixel at a time CurrentPixel Data0 Data1 >250 >250 Brightest Pixel in the middle of two pixels > 250. Sliding window of three pixels being analyzed. Testing the middle pixel for being the laser spot. Sliding window LaserSpot Algorithm Analysis
Basic LaserSpot interface with the project CameraIn LaserSpot SendData Xbus to mController
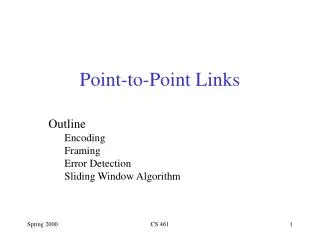
Alternate Algorithms Image is already in memory. Scan entire image and look at the pixel above, below, left, and right of the current pixel being analyzed as the laser spot. Current Pixel Being Analyzed Neighboring pixels that must be above the brightness threshold for the red pixel to be the laser spot.
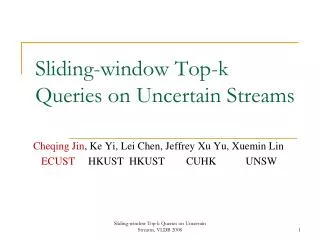
Alternate Algorithms Add up the row and column for each bright pixel in the image and keep track of the total number of bright pixels. Then find the average row and column. Bright Noise Pixels Laser Point Pixels Average Bright Pixel = Laser Spot Key: Red Pixel => Bright pixels (> 250) Grey Pixel => Normal Pixel (< 250) Blue Pixel => Average Bright Pixel and (for this example) a red pixel
Alternate Algorithms Average the bright spot found in four separate images to determine the most likely place for the actual laser spot. Bright Pixels in each image Incorrect Analysis of bright pixel for this image Average over four images Correct Pixel Location Calculated Pixel Location Incorrect Pixel Location => Noise