Download
1 / 34
350 likes | 572 Vues
Thermodynamic Based Modeling for Nonlinear Control of Combustion Phasing in HCCI Engines. J.B. Bettis, J.A. Massey and J.A. Drallmeier Department of Mechanical and Aerospace Engineering Missouri University of Science and Technology J. Sarangapani

E N D
Thermodynamic Based Modeling for Nonlinear Control of Combustion Phasing in HCCI Engines J.B. Bettis, J.A. Massey and J.A. Drallmeier Department of Mechanical and Aerospace Engineering Missouri University of Science and Technology J. Sarangapani Department of Electrical and Computer Engineering Missouri University of Science and Technology Oak Ridge National Laboratories June 23, 2010
Outline • Background • State-Space Methods • Specific Objective • Experimental Setup • Model Development • Results • Extension to Other Fuels • Conclusions
Background • Unlike SI or CI engines, HCCI requires advanced control strategies for proper control of combustion phasing. • A model which captures the key dynamics of the HCCI process is essential to achieve this control. • Modeling the onset of combustion is difficult due to its dependence on chemical kinetics through reactant concentrations and temperature (Yao et al.) • Control-oriented models must remain as simplistic as possible while still capturing the key dynamics of the process. • Previous models of this nature have been developed, most of which utilize linearization in order to achieve effective control (Shaver, Roelle et al).
State-Space Methods for Control Strategy used for advanced control Can handle multiple input-multiple output nonlinear systems Represented by a discrete system of the form: xk+1 = F(xk,uk) (i.e. T1,k+1 = F(T1,k, αi,k, θ23,k, Tin,k, αe,k, αe,k-1)) Current state is determined by previous state and input F is typically nonlinear Control input is inside the nonlinearity Linearization essentially simplifies the control problem, but comes with a price F becomes linear xk+1 = Axk + Buk Reduced operating range and loss of some nonlinearities This model developed with nonlinear control in mind Significant challenges in control, but more accurate Motivation for a discrete state engine model
Specific Objectives • The specific objective of this work is to develop a nonlinear control-oriented model of the HCCI process which provides a platform for nonlinear controller development. • Methodology: • Use a five state ideal thermodynamic cycle to develop a discrete model. • Investigate the engine cycle to determine where it should begin for control. • Investigate HCCI combustion timing models to determine which one best balances accuracy and simplicity.
ExperimentalSetup Hatz 1D50Z CI engine operating in HCCI mode Existing preliminary data taken by Scott Eaton and Jeff Massey at ORNL. Varied intake temperature using resistance heater to vary timing Run using a 96RON Unleaded Test Gasoline (UTG96) Sister engine being set up at MS&T
ModelDevelopment Five state thermodynamic cycle Adiabatic, constant pressure induction Isentropic compression Constant volume combustion Isentropic expansion Isentropic blowdown to an adiabatic, constant pressure exhaust Stoichiometry modeled using C/H = 7/16 Gasoline-type fuels (exhibit little low temperature heat release (LTHR)) Extension to other fuels possible
Model Development Engine cycle begins with compression.
Model Development (Combustion Timing) Integrated Arrhenius Rate model (Shaver) Relates timing to reactant concentrations and temperature Evaluate integrand at TDC Modified integration limits Threshold calculated at one setpoint and held constant at all others.
Model Development (Combustion Timing) • Variable Δθ • Real combustion event is not instantaneous • Exp. data shows relation to SOC • Developed correlation from exp. data • Related to chemical kinetics (Chiang, Stefanopoulou) • Residual fraction • Effects combustion through temperature and dilution. • Introduces cyclic coupling • Utilized correlation from the literature (Waero)
Definitions for control State variables Temperature at IVC Residual fraction Inputs Intake temperature External EGR fraction Fueling rate Outputs Peak pressure θ23 Model Development (Control)
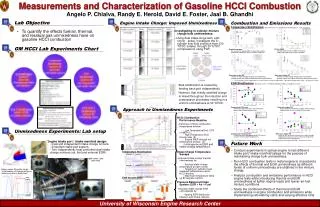
Results - ValidationPressure Evolution Simple model captures pressure evolution 6 gpm UTG96 Tin=495K 9 gpm UTG96 Tin=463K • Single threshold captures drop in peak pressure
Results - ValidationSOC Tracking Fdes evaluated using 9 gpm fueling rate at Tin=463K. 9 gpm UTG96 Trends are most important for control. 6 gpm UTG96
Results - ValidationModel θ23 vs. Exp. CA50 Variable Δθ has significant impact. 9 gpm UTG96 Constant Δθ representative of linearization. 6 gpm UTG96
Results Pressure Rise Rates Efficiency UTG96 UTG96 Heat transfer effects. Unburned Hydrocarbons.
ResultsHCCI Operating Range 9 gpm fueling rate UTG96 Excessive pressure rise rates Late combustion results in significant cyclic variations Limits effectively captured by model.
ResultsHCCI Operating Range 9 gpm fueling rate UTG96 Late combustion resulting in significant cyclic variations Excessive pressure rise rates Future control objective: Maximize efficiency while minimizing PRR.
Preliminary ResultsClosed-Loop Control Optimal Neural Network controller tracks a desired θ23. Possible future control objectives are also shown
Preliminary ResultsClosed-Loop Control Controller based on previous work done at MS&T for lean SI engines. Nonlinear NN controller. Controller learns how the model behaves and then tracks a desired θ23. Noise added to states
Extension to Other Fuels Experimental data reveals that all fuels behave similarly as intake temperature is varied. How can we explain the shift seen in the experimental data as the fuel is varied? Similarities between HCCI auto-ignition and SI knock suggest that RON and MON may be responsible.
Extension to Other Fuels TRF Gasoline-Type • Due to differences in engine operating conditions, RON and MON alone cannot fully describe HCCI ignition (Kalghatghi) • It turns out Octane Index (OI) does a good job of predicting HCCI auto-ignition (Kalghatghi) • Combines RON and MON values • Accounts for engine operating conditions UTG PG TRF UTG Oxygenates E50 E85 E50 Hydrocarbons and alcohols exhibit different behavior.
Extension to Other Fuels • Physical relationship between OI and Ea • Resistance to auto-ignition vs. energy required for reactions to occur • Developed an experimental correlation between OI and activation temperature (Ea/Ru) • Based on experimental combustion timing E85 E50 TRF UTG96 PG
Extension to Other Fuels • Using the same threshold value, the activation temperature was modified to account for different fuels • Separate model developed for alcohols based on E85 stoichiometry • Same general form as previous model • Accounting for OI allows the model to predict ignition timing for various fuels Gasoline-Type Oxygenates
Conclusions • A control-oriented model of the HCCI process was developed in the form of a nonlinear discrete time system for state space control. • This model was validated against experimental HCCI data and was able to accurately predict trends. • The model displays an operating range similar to that seen in experiment. • The model displays high sensitivity to intake temperature, similar to what is seen in the literature (Yao et al.) • Extension to other gasoline-type fuels is possible by modifying the activation temperature to reflect changes in OI.
Acknowledgments • Funding for this project was provided by the National Science Foundation under grant ECCS-0901562. Also, thanks to Dr. Bruce Bunting of ORNL for allowing data collection from the Hatz engine. • Questions?
State Space Methods Model results in a non-affine nonlinear discrete system. xk+1 = F(xk,uk, uk-1) yk = H(xk,uk-1) Control input is inside the nonlinearity F and H are not accurately known, so how can we linearize it? Significant challenges in control due to MIMO non-affine system.
ResultsOutput Sensitivity Gave random 1% perturbations to Tin Observed effects on control outputs 9 gpm fueling rate No EGR Ignition does not occur for intake temperatures less than 430 K, which is also seen in the experimental data. Sensitivity increases as temperature decreases. Outputs much more sensitive to temperature than dilution.
Preliminary ResultsClosed-Loop Control 9 gpm fueling rate Tin = 463 K Controller effectively rejects noise. Control switched ON Cyclic variability is significantly reduced when control is switched on.
Preliminary ResultsClosed-Loop Control Optimal controller results in a tradeoff between tracking Theta23 and energy expended (via Tin). The faster we make the Tin actuator, the faster we can track Theta23. Intake temperature required to track Theta23.