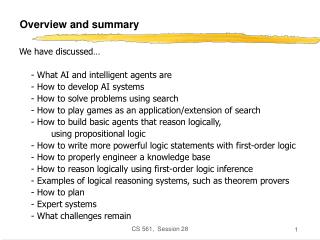
Understanding Logical Agents in AI
Learn about goal-based agents, inference models, and Wumpus world agents. Explore propositional logic and agent functions.

Understanding Logical Agents in AI
E N D
Presentation Transcript
Ch. 7 – Logical Agents Supplemental slides for CSE 327 Prof. Jeff Heflin
Goal-Based Agent sensors State What the world is like now How the world evolves Environment What it will be like if I do action A What my actions do What action I should do now Goals actuators Agent From Fig. 2.13, p. 50
Knowledge-Based Agent function KB-AGENT(percept) returns an actionstatic: KB, counter t=0 TELL(KB, MAKE-PERCEPT-SENTENCE(percept, t)) action ASK(KB, MAKE-ACTION-QUERY(t)) TELL(KB, MAKE-ACTION-SENTENCE(action, t))t t + 1return action From Figure 7.1, p. 196
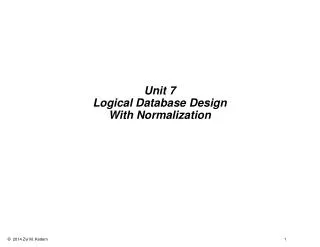
Grammar for Propositional Logic Sentence AtomicSentence | ComplexSentence AtomicSentence True | False | Symbol Symbol P | Q | R | … ComplexSentence Sentence|(Sentence Sentence) | (Sentence Sentence) | (Sentence Sentence) | (Sentence Sentence) From Figure 7.7, p. 205
Inference via Model Checking function TT-ENTAILS?(KB, ) returns true or false symbols a list of the proposition symbols in KB and return TT-CHECK-ALL(KB, , symbols, []) function TT-CHECK-ALL(KB, , symbols, model) returns true or false if EMPTY?(symbols) thenif PL-TRUE?(KB, model) then return PL-TRUE?(, model)else return trueelse doPFIRST(symbols); rest REST(symbols) return TT-CHECK-ALL(KB, , rest, EXTEND(P,true,model)) andTT-CHECK-ALL(KB, , rest, EXTEND(P,false,model)) From Figure 7.4, p. 209
Wumpus World Agent function PL-WUMPUS-AGENT(percept) returns an actioninputs: percept, a list [stench, breeze, glitter]static: KB, a knowledge base, initially containing “rules” of the Wumpus worldx, y, orientation, the agent’s position visited, array of squares visited by agent, initially emptyaction, most recent action, initially nullplan, an action sequence, initially empty update x, y, orientation, visited based on actionifstenchthen TELL(KB, Sx,y) else TELL(KB, Sx,y) ifbreezethen TELL(KB, Bx,y) else TELL(KB, Bx,y) ifglitterthenaction grabelse if plan is nonempty then action POP(plan)else if for some fringe square [i,j], ASK(KB, (Pi,j Wi,j)) is trueor for some fringe square [i,j], ASK(KB, (Pi,j Wi,j)) is falsethen do plan A*-GRAPH-SEARCH(ROUTE-PROBLEM([x,y], orientation,[i,j], visited))action POP(plan)else action a randomly chosen movereturn action From Figure 7.19, p. 226