ChE 491 / 433
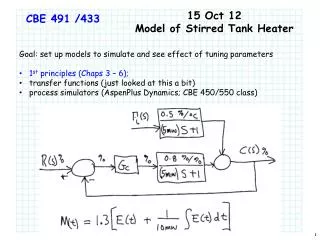
ChE 491 / 433. 22 Oct 12. ChE 491 / 433. 22 Oct 12 Ziegler-Nichols (ZN I) (QDR or QAD Tuning ) (Ultimate Gain). +. +. +. -. Feedback Controller Tuning: (General Approaches). Simple criteria; i.e QAD via ZN I, t r , etc e asy, simple, do on existing process multiple solutions

ChE 491 / 433
E N D
Presentation Transcript
ChE491 / 433 22 Oct 12
ChE491 / 433 22 Oct 12Ziegler-Nichols (ZN I)(QDR or QAD Tuning) (Ultimate Gain) + + + -
Feedback Controller Tuning: (General Approaches) • Simple criteria; i.e QAD via ZN I, tr, etc • easy, simple, do on existing process • multiple solutions • Time integral performance criteria • ISE integral square error • IAE integral absolute value error • ITAE integral time weighted average error • Semi-empirical rules • FOPDT (ZN II) • Cohen-Coon • ATV, or Autotuning • Trial and error • Rules of thumb
Ziegler Nichols I (Ultimate Gain Method) Procedure, done closed loop (on-line): • P-Only (switch off integral & derivative modes) • Controller in Auto mode (closed loop) • Adjust Kc • “bump” process with small setpoint change • Find Kc where loop response is undamped
Ziegler Nichols I (Ultimate Gain Method) Procedure, done closed loop (on-line): • P-Only (switch off integral & derivative modes • Controller in Auto mode (closed loop) • Adjust Kc • “bump” process with small setpoint change • Find Kc where loop response is undamped • Record Kc (call it Kcu– the ultimate gain) • Measure Tu (the ultimate period) • Use Table 7-1.1 to get tuning constants • Adjust controller settings to calculated values • Test to see if need to make fine adjustments
Ziegler Nichols I (Ultimate Gain Method) Response to disturbance should be close to QDR (QAD) Advantages: • Don’t need to know mathematical models • Easy to use • Use on any process you can get to oscillate Disadvantages: • Must force loop / process to oscillate (operating close to unstable) • Tuning constants not unique, except for P-only
Quarter Decay Ratio (QAD) Advantages: • Good for load disturbances • Prevents large initial deviations w/o too much oscillations • Gives good “Ball Park” values; leading to fast responses for most processes Disadvantages: • For SP changes, may overshoot too much • Parameters for PI, PID, not unique • May be too aggressive for cases where K or to change.
PS Exercise: Tuning Two Tanks in Series Loop Pro Trainer (process simulator): • Launch Loop Pro Trainer • Select Case Studies • Select Gravity Drained Tanks • Press the pause button • Adjust controller output to 50% • Press run (continue) button and let run till achieve steady state • Click the rescale button to re center the plot • Adjust controller output to achieve a level in tank 2 of 2 meters • Click the controller button and turn to PID control (P-Only) • You may have to turn the Integral part off; and Kc = 4 %/m • Press run button and adjust the disturbance up and down 0.5 l/min • Then adjust the set point up and down 0.5 m • Observe how the system behaves.
PS Exercise: Tuning Two Tanks in Series Loop Pro Trainer (process simulator): • Launch Loop Pro Trainer • Select Case Studies • Select Gravity Drained Tanks • Now, double Kc and observe effect. • Double it again… • Try it at Kc= 2 %/m
PS Exercise: Tuning Two Tanks in Series Loop Pro Trainer (process simulator): • Now turn on the Integral term (tI should be 4.0 min) and do the same adjustments, observing the behavior of the system. • You may need to adjust the History to see the full change. • Change tI and observe the effect. • Make sure you are back to the original settings (SP = 2m, Level at 2 m, etc) when you start and end with the PI controller.
PS Exercise: Tuning Two Tanks in Series Loop Pro Trainer (process simulator): • Now turn on the Integral term (tI should be 4.0 min) and do the same adjustments, observing the behavior of the system. • You may need to adjust the History to see the full change. • Change tI and observe the effect. • Make sure you are back to the original settings (SP = 2m, Level at 2 m, etc) when you start and end with the PI controller. • Now let’s tune the controller. • Use the Ziegler Nichols I method to find Kcu and Tu. • Tune the controller for: • P – only control • And then for PI control.
Loop-Trainer Kcu ~ 72, delta R = 4 –> 4.5
ChE491 / 433 22 Oct 12
Feedback Controller Tuning: (General Approaches) • Simple criteria; i.e QAD via ZN I, tr, etc • easy, simple, do on existing process • multiple solutions • Time integral performance criteria • ISE integral square error • IAE integral absolute value error • ITAE integral time weighted average error • Semi-empirical rules • FOPDT (ZN II) • Cohen-Coon • ATV, or Autotuning • Trial and error • Rules of thumb
PS Exercise: Tuning Two Tanks in Series Different opinions: • Different correlations will give different constants in the controller equations. D. Cooper suggests if one is uncertain, to start conservative, i.e. with the smallest controller gain and the largest integral (reset) time, thus, giving the least aggressive controller. Finalcontroller tuning may best be performed on-line by trial and error, using experience and knowledge of the process, to obtain the desired controller performance. • To changes in the setpoint or load disturbances: • if the process response is sluggish; Kcis too small and/or Iis too large. • if the process response is too quick and perhaps oscillating is not desired; Kcis too large and/or Iis too small. Ziegler-Nichols may be too aggressive for many ChE applications. Luyben(Plantwide Dynamic Simulators in Chemical Processing and Control, Wiley, 2002) suggests for PI controller Kc = Ku / 3.2 and I= 2.2 * Tu .
tI Step Change Responses: Kc
Is Kc or tI too high? Kctoo large Properly tuned controller tI too large
Feedback Controller Tuning: (General Approaches) • Simple criteria; i.e QAD via ZN I, tr, etc • easy, simple, do on existing process • multiple solutions • Time integral performance criteria • ISE integral square error • IAE integral absolute value error • ITAE integral time weighted average error • Semi-empirical rules; FOPDT fit to Open Loop Step Test • Ziegler-Nichols Open Loop (ZN II) • Cohen-Coon • ATV, or Autotuning • Trial and error • Rules of thumb
Ziegler Nichols II (ZN II) Fit response to FOPDT model + + + -
Ziegler Nichols II (FOPDT fit) Procedure, usually done open loop: • Put controller in Manual mode • Manually make step change in controller output • Observe (record) data and fit to FOPDT model
Open-Loop Step Test……..FOPDT: Smith & Corripio Method Estimation of Fit 3 suggested for non-integrating processes: Fit 3: 7-2.16 p 239
Open-Loop Step Test……..FOPDT: Smith & Corripio Method Estimation of Fit 1 suggested for integrating processes. What happens to h ?? h = constant integrating process h non-integrating process (self-regulating)
Ziegler Nichols II (FOPDT fit) Procedure in open loop: • Put controller in Manual mode • Manually make step change in controller output • Observe (record) data and fit to FOPDT model
Procedure same as for ZN II (open loop step test): Cohen-Coon: • The Ziegler-Nichols rules are more sensitive to the ratio of dead time to time constant, and work well only on processes where the dead time is between 1/4 and 2/3 of the time constant. • The Cohen-Coon tuning rules work well on processes where the dead time is between 1/10 and 4 times the time constant. • “Quarter-amplitude damping-type tuning also leaves the loop vulnerable to going unstable if the process gain or dead time doubles in value.” Smuts suggests reducing Kc by ½ to avoid problems later on. * Jacques F. Smuts, Process Control for Practitioners, Opticontrols, Inc (2011)
PS Exercise: Use The Step Test (ZN II, or Open Loop FOPDT Fit) to Tune The PI Controller • Launch Loop Pro Trainer • Select Case Studies • Select Gravity Drained Tanks • Press the pause button • Adjust controller output to 51% • Tune controller for operation around a tank level of 2 meters
ChE491 / 433 29 Oct 12
Feedback Controller Tuning: (General Approaches) • Simple criteria; i.e QAD via ZN I, tr, etc • easy, simple, do on existing process • multiple solutions • Time integral performance criteria • ISE integral square error • IAE integral absolute value error • ITAE integral time weighted average error • Semi-empirical rules • FOPDT (ZN II) • Cohen-Coon • ATV, or Autotuning • Trial and error • Rules of thumb
Time Integral Performance Criteria • disturbance/load change • setpoint change Integrate error from old SP Integrate error from new SP
Time Integral Performance Criteria • Smith/Murrill developed unique tuning relationships • IAE (Integral of the Absolute value of the Error) • ITAE (Integral of the Time-weighted Absolute value of the Error) Eqn: 7-2.17 p 245 • Determine type of input/forcing function (i.e. purpose of controller) • maintain c(t) at setpoint (“Regulator” controller) • c(t) track setpoint signal (“servo” control)
PS EX: Find PI Parameters for IAE Criteria • Launch Loop Pro Trainer • Select Case Studies • Select Gravity Drained Tanks • Put your PI tuning parameters into the simulator controller and check tuning. • Do the parameters need to be adjusted?
ChE491 / 433 29 Oct 12
Step Testing Thoughts • Single step; can be analyzed by hand • Pulse, doublet, pseudo-random binary sequence (PRBS) tests; require computer tools for analysis • Data collected should meet these criteria: • Process at steady state before data collected • Signal to noise ratio should be 10 or greater • Collected data should be done when no disturbances were present • After fitting, the model appears to fit the data visually
Step Testing Thoughts • Single step • + simple, graphical analysis can be done • long time away from desired operating level (DLO; or SP) • Data only on one side of DLO • Pulse (two step tests in rapid succession; 1 up and 1 back down) • + only need to let measured process variable show a clear response • long time away from desired operating level (DLO; or SP) • Data only on one side of DLO
Step Testing Thoughts • Doublet Test • + two pulse tests; one up; one down; ending at beginning level • + obtain data on both sides of DLO • + relatively quickly return to normal operation level • + a preferred method of some in industry for open loop tests • since done open loop; could be concern for certain systems
Step Testing Thoughts • PRBS Test (pseudo-random binary sequence ) • + theoretically PV shouldn’t vary far from DLO • need a well defined, random test • should have some idea of process gain, time constant, and deadtime • might take longer than a doublet test
Step Testing Comparisons Doublet PRBS