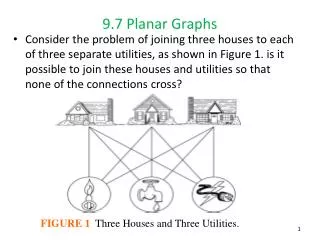
Planar Graphs
Planar Graphs. Graph G is planar , if it can be “properly” drawn in the plane. In order to explain this informal notion we have to define embeddings of graphs. Embeddings.

Planar Graphs
E N D
Presentation Transcript
Planar Graphs • Graph G is planar, if it can be “properly” drawn in the plane. In order to explain this informal notion we have to define embeddings of graphs.
Embeddings • Let S be a “nice” topological space such as metric space. An embedding of a general graph :G S is defined as follows: • Injective mapping :V(G) S • Family of continuous mappings e:[0,1] S, for each edge e = uv so that e(0) = (u) and e(1) = (v). • In the interior of the interval e is injective and • its image contains no point that is an image of some other vertex or edge. • Connected component of S – (G) is called a face of the embedding. • Graph G is planar, if it can be embedded in the plane.
Exercises • N1. Show that K4 can be embedded in the plane. • N2. Show that Petersen graph can be embedded in the projective plane. • N3. Prove: graph is planar if and only if it can be embedded in a sphere. (Hint: use stereographic projection.)
Stereographic Projection • There is a homeomorphic mapping of a sphere without the north pole N to the Euclidean plane R2. It is called a stereographic projection. • Take the unit sphere x2 + y2 + z2 = 1 and the plane z = 0. • The mapping p: T0(x0,y0,z0) a T1(x1,y1) is shown on the left. N T0 T1
Stereographic Projection • The mapping p: T0(x0,y0,z0) a T1(x1,y1) is shown on the left. • r1 = r0/(1-z0) • x1 = x0/(1-z0) • y1 = y0/(1-z0) N T0 T1
Example • Take the Dodecahedron and a random point N on a sphere. • Stereographic projection is depicted below.
Example • A better strategy is to take N to be a face center as shown on the left.
Euler formula for planar graphs • For a connected plane graph G with v vertices, e edges and f faces we have: • v – e + f = 2. • Warning: the outer face is counted!
Fary’s Theorem • Each simple planar graph admits a specially nice embedding. • Theorem (Fary): Each simple planar graph can be embedded in the plane in such a way that all edges are represented with straight line segments.
Kuratowski’s Theorem • Theorem (Kuratowski): Graph G is planar if and only if it contains no subdivision of K5 neither a subdivision of K3,3. • Graphs K5 and K3,3 are called the Kuratowski graphs.
Applications of Kuratowski’s Theorem • Any graph can now be either drawn in the plane or one can find a subdivision of a Kuratowski graph in it. • For any graph on n vertices there are efficient algorithms for checking if the graph is planar. The best one runs in linear time ( O(n)).
Wagner Theorem • Similar to Kuratowski: • Theorem (Wagner): Graph G is planar if and only if it contains no subgraph that can be contracted to one of the two Kuratowski subgraphs.
Exercises • N4. By using Kuratowski’s Theorem show that the Petersen graph is non-planar. • N5. By using Wagner’s Theorem show that the Petersen graph is non-planar. • N6. Show thst far any planar graph with v vertices, e edges and girth g the following is true: (g-2)e g(v-2) • N7. By using Euler’s formula show that the Petersen graph is non.-planar.
Skeleta of Geometric Bodies • To each geometric polyhedron T we may associate a graph G(T), by selecting the vertices and edges of the polyhedron. The obtained graph is called the skeleton of T. • Sometimes we use the same name for the polyhedron and for the graph. Later we will see why such a naiming is permitted.
Melancholia I • The renowned graphics “Melancholia I” by Albrecht Dürer contains a misterious body (polyhedron) whose construction is now understood.
Dürer Polyhedron • It is obtained from an elongated cube by truncating the top and bottom vertex. • A polyhedron with 8 faces is obtained: • 6 pentagons • 2 regular triangles
Exercises • N8. The angles in the Dürer pentagon (see figure on the left) indicate fivefold symmetry and thus implicitely the golden section. Determine the lengths of the sides of Dürer polyhedron. • N9. Determine coordinates of Dürer polyhedron. (Hint: Pentagon on the left has an circumscribed circle.)
Skeleta of Polyhedra are Modeled by Graphs • On the left we se Dürer graph, with 12 vertices and 18 edges, the skeleton of Dürer polyhedron. Graph is isomorphic to the generalized Petersen graph G(6,2).
Steinitz Theorem • Theorem [Steinitz]. A simple graph G is planar and 3-connected if and only if it is the skeleton of a convex three-dimensional polyhedron.
Fullerene • Fullerene is a convex trivalent polyhedron, whose faces are only pentagons and hexagons.
Dodecahedron • Dodecahedron is the smallest fullerene.
Buckminster Fullerene • The most well-known fullerene is Buckminster fullerene on 60 vertices. It is a truncated icosahedron. • Buckminster fullerene is a model of a carbon molecule.
Exercises • N10. Each fullerne has exactly 12 pentagonal faces. • N11. Each fullerene has an even number of vertices. • N12. A Fullerene has at least 20 vertices. • N13. For each even n, n ¸ 20, n ¹ 22 there exists a fullerne on n vertices.
Tutte’s Planarity Algorithm • A cycle C of G is called peripheral if • no edge not is C joins two vertices in C • G \ C is connected. • For example, a face of a 3-connected planar graph can be shown to be a peripheral cycle. • The embedding r of G in the plane is barycentricrelative to S µ V(G) if for each vertex u Ï S the point (vector) r(u) is the barycenter of the of images of neighbours of u.
Tutte’s Embedding • Theorem [Tutte].Let C be a peripheral cycle of length d in a connected simple graph G. Let s be a mapping from V(C) to the vertices of a convex d-gon in R2 such that adjacent vertices in C are adjacent in the polygon. The unique barycentric representation determines a drawing of G in R2. This drawing has no crossings if and only if the graph is planar. • [The vertex coordinates in R2 can be obtained by solving a linear system. This gives an O(n3) planarity test algorithm].
Prisms • Skeleton of an n-sided prism is denoted by Pn. Graph is planar, trivalent and has 2n vertices.
Antiprisms • Skeleton of an n-sided antiprism is denoted by An. Graph is planar, tetravalent and has 2n vertices. A6
Möbius Ladders • Möbius ladder Mn is obtanied from C2n by adding n main diagonals. M5
Exercises • N14. Show that Pn can be obtianed from Mn by deleting and reataching two edges. • N15. Use Tutte’s algorithm to draw the Petersen graph and use one of the pentagonal cycles C5 as the peripheral regular pentagon with unit side length. Verify that the inner cycle is drawn as the pentagram. Determine its side.
Homework • H1. Show that every graph can be embedded in ℝ3. (Hint: place vertices on the helix curve (cos t, sin t, t) or even better on the curve (t,t2,t3). • H2. Show that there is only one fullerene on 24 vertices. Draw its skeleton. • H3. Prove that none of the Möbius ladders Mn is planar. • H4. Use Tutte’s algorithm to draw the cube Q3 and use the unit square for the outer face. What is the length of a side in the opposite, inner face?