Mars Rover
Mars Rover. By: Colin Shea Dan Dunn Eric Spiller. Advisors: Dr. Huggins, Dr. Malinowski. Outline. Project Summary Review of Previous Work Division of Labor Project Description Data Sheet Equipment and Parts Design Changes Schedule Progress Update Results Future Revisions.


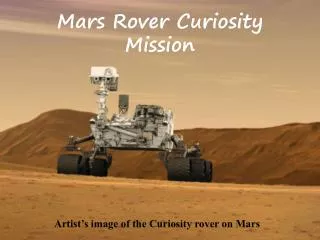
Mars Rover
E N D
Presentation Transcript
Mars Rover By: Colin Shea Dan Dunn Eric Spiller Advisors: Dr. Huggins, Dr. Malinowski
Outline • Project Summary • Review of Previous Work • Division of Labor • Project Description • Data Sheet • Equipment and Parts • Design Changes • Schedule • Progress Update • Results • Future Revisions
Project Summary • The main objective is to design the Rover for long battery life that must last 7 days without recharging. • The Rover will use a PC104 computer to control the interface between the user and the Rover. • It will also use the MicroPac 535 microprocessor to control low level software such as the motors, the sonar system, and the battery level. • The user will be able to enter a specific distance, move the Rover using the keypad, or rotate the Rover to get a preferred direction.
Previous Work • 2002 • Rob Shockency and Randall Satterthwaite • Robotic Platform Design • EMAC 8051 and a CPLD • Design Goals • 1. Create Cheaper version of Telerobotics 2001 • 2. Upgradeable and expandable in the future
Division of Labor Dan DunnColin SheaEric Spiller Assembly Code Java/Server Hardware - Motor Control - Image Capture - DC Motors - Wheel Sensors - Rover Controls - Platform Construction - Battery Charge Level - Serial Communication - H-bridge/Motor Driver - Serial Communication - Battery Charger - Acoustic Sensors
Functional Description • Wait mode – • All systems are powered, except the motors. • The CPU monitors the wireless card for network activity • The last image captured from the camera is displayed to the user. • Web page accessible to user • Battery Status is monitored • Sleep mode – • The sub-systems are powered down except for the CPU and the wireless network card. • CPU runs in a reduced power mode. • Web page accessible • Battery Status is monitored. • Rover remains in sleep mode until signaled by the user.
Functional Description • Low battery mode – • Battery drops below 10% of charge Distance and Direction Control • Email sent to Dr. Malinowski requesting a charge • Rover shuts down all components, except Micropac 535. • User mode – • All Systems powered • Distance and Direction Control • Web Page accessible to user • Image capture and display • Charge mode – • Rover continues to charge until power button is pressed • Stays in this mode until battery level reaches 100%
Software Flow Chart • High Level Software • Rover Control
Software Flow Chart • High Level Software • Image Retrieval/Display
Software Flow Chart • Low Level Software • Motor Control
Software Flow Chart • Low Level Software • Object Detection
Software Flow Chart • Low Level Software • Battery Voltage Level
Data Sheet Specifications Turning accuracy - ± 5° for an individual turn command Turning resolution - 15° Driving accuracy - ± 5cm and ± 2° for a 100cm command Camera capture speed – 5 frames/sec @ 324x288 resolution for a 10BaseT connection Weight – ~33lbs Battery life – 7 days without a recharge Top speed – 10cm/s Battery charge level accuracy - ± 5% Acoustic sensors – Time between transmit signals – 1 second Farthest object detection – 200cm Closest object detection – 5cm
Data Sheet PC104 – Max Current, during boot – 1.5A Normal operating current – .8A Sleep mode current – .026A Processor – National Semiconductor Geode Processor @ 300MHz RAM – 128MB Video – Onboard Video card PCMCIA module – Current - .07A Wireless Card – Linksys WPC11 Max Current - .3A Current in Sleep mode - .02A Hard Drive – IBM Travelstar 2.5 inch IDE hard drive, 10GB Max Current - .94A (Spin-up Current) Current in Sleep Mode - .02A Camera – Logitech USB Webcam Max Current - .1A Motors – Model number – GM9236 Gearing – 1:65.5 Voltage – 12V
Power Calculations Power Consumption for Sleep Mode: PC104 computer .026A PC104 PCMCIA module .07A IDE Laptop Hard drive .015A PCMCIA Wireless Card .009A EMAC .045A + _____ Total .165A 24hrs * 7days = 168hrs 168hrs * .165A = 27.72 Ah @ 5V 27.72Ah * 5V = 138.6Wh Using 3 - 12 Volt, 7.2Ah batteries: 12V * 7.2Ah * 3 = 259.2 Wh available
Power Calculations Power Consumption for User Mode: PC104 computer .800A PC104 PCMCIA module .070A IDE Laptop Hard drive .400A PCMCIA Wireless Card .285A EMAC .045A Camera .100A 2 DevanTech SRF04 .060A + ______ Total 1.760A
Power Calculations • Motors with a load draw 0.5 - 0.8 A. • Total Amps with motors: 1.76A + (0.4A * 2) = 2.56A • [(0.8A * 12V + 1.76A * 5V) * 4.1% + (.165A * 5V) * 95.9%] * 168hrs = 259.2Wh • If the Rover is in User Mode for 4.1%, then 168 hrs * 4.1% = 6.88hrsof battery life dedicated to User Mode
Design Changes • Replaced Linux based operating system with Windows based operating system • Video Card was incompatible with Linux although manufacturer stated the card was compatible • Linux operating system was not stable on PC-104 board
Design Changes • Flash Memory Card and PCMCIA Hard drive replaced by Laptop Hard drive • Flash Memory Card was not capable of booting the PC-104 at start-up • PCMCIA Hard drive was not visible by computer until system completed start-up sequence • Laptop Hard drive booted easier and still remained low power • Flash Memory Card was used as secondary drive to limit usage of Laptop Hard drive • Contained component software for Web Server (Apache and Java)
Progress Flow Chart Green = Developed
Results • H-bridges introduced noise to the system
Future Revisions • Replace H-Bridge with Power Amp / Switching Circuit