Advanced Servo System Design: Enhancing Velocity Control and Disturbance Rejection
This document discusses the proposed design of a sophisticated servo system that meets stringent resolution requirements. Key topics include the selection of appropriate resolution encoders, velocity configurations, and PID tuning values. The analysis also covers wind loading tests, open and closed-loop responses, and mechanical modeling using MATLAB for 5-DOF and 6-DOF systems. Additional considerations involve the impact of disturbance rejection strategies and quantization effects. The paper aims to provide insights into optimizing servo system performance under various operational conditions.

Advanced Servo System Design: Enhancing Velocity Control and Disturbance Rejection
E N D
Presentation Transcript
TCS3 Servo System Proposed Design
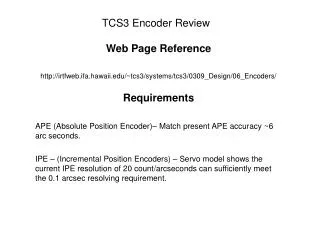
Why Model? • Meet Resolution Requirements • What Resolution Encoder to use? • Velocity Configuration • PID Values • Wind Loading Tests
Tests • 10 arcsec Offset • 15 arcsec/sec Track • Open/Closed Loop Response • Wind Loading • Frequency Sweep
Present System vs. JPL System • Added Transfer Functions • Added Quantization Blocks • Added Rate Limiter • Dual Opposing Motor Mechanical Model • Disturbance Rejection in Velocity loop • Adjust C3 and C4 gains to reflect present system components
Proposed System vs. Present • Delta Tau PMAC Configuration for PID • Use present Tachometer Loop • Adjust C4 gain for 16 bit DAC