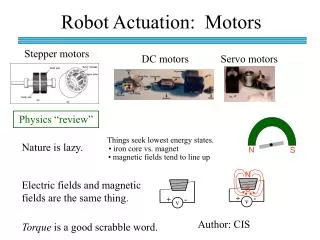
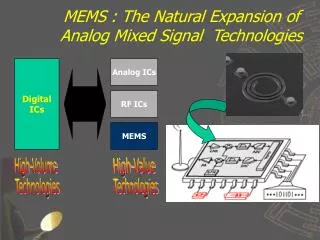
MEMS Actuation Basics: Electrostatic Actuation
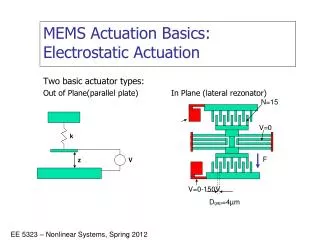
Two basic actuator types: Out of Plane(parallel plate) In Plane (lateral rezonator). N=15. V=0. k. z. V. F. V=0-150V. D gap =4 µm. MEMS Actuation Basics: Electrostatic Actuation. Out of plane actuator. MEMS Actuation Basics: Electrostatic Actuation. k. Zo-Z. V. Z. Zo. Unstable.

MEMS Actuation Basics: Electrostatic Actuation
E N D
Presentation Transcript
Two basic actuator types: Out of Plane(parallel plate) In Plane (lateral rezonator) N=15 V=0 k z V F V=0-150V Dgap=4µm MEMS Actuation Basics: Electrostatic Actuation
Out of plane actuator MEMS Actuation Basics: Electrostatic Actuation k Zo-Z V Z Zo Unstable Problem: Snap-down occurs in 2/3 of the travel range. Hard Stops 0.33 Zo Stable V Vsnap
Out of plane actuator k Zo-Z V MEMS Actuation Basics: Electrostatic Actuation Solutions: • Use hard stops: reduced range of motion • Use charge control: requires on-chip circuitry • Stiffening mechanical spring: increases required voltage
Out of plane actuator k Zo-Z V MEMS Actuation Basics: Electrostatic Actuation Solutions: • Use hard stops: reduced range of motion • Use charge control: requires on-chip circuitry • Stiffening mechanical spring: increases required voltage
N=15 V=0 F V=0-150V Dgap=4µm MEMS Actuation Basics: Electrostatic Actuation • In plane MUMPS or DRIE comb drive Linearized comb model V=0 Damping is given by a Couette flow Model. High K => High Q, high force. Low K => High displacement.
MEMS Actuation Basics: Electrostatic Actuation T – actuator thickness Xo – finger engagement L – finger length H(x)=g(x)-f(x+L-xo) – gap function • General Formula stationary f(x+L-xo) x g(x) movable xo L Only if the fingers are sufficiently Parallel to one another.
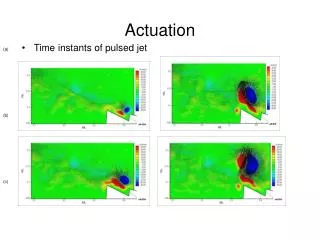
Principle: Electrical current Joule Heating Thermal expansion Deflection and Force Thermal governing equation: Fourier (Heat) Equation: MEMS Actuation Basics: Electrothermal E - Thermal energy stored W - Power Generated by Joule Heat H - Heat Transferred to surroundings • C- volumetric specific heat • - thermal conductivity K – convection coefficient
If the driving input is voltage applied: Electrothermal MEMS bimorph Elements n-1, n, n+1 FEA Approximation Model: “hot” arm “cold” arm In which Rn is the resistance of the n-th element which depends on temperature +V-
The full linearized model is expressed by: Thermal Bimorph: Electro-Thermal-Mechanical Model In this equation and are vectors containing positions and temperature of the elements, while M, B, K, N, and are tri-diagonal matrices. The governing equations are non-linear. An FEA package will simply integrate the equations using many elements to provide a solution.
Electrothermal MicroActuators Rotary stage, tooth gap – 6 µm [Skidmore00] Precision guided MEMS flexure stage And microgrippers using flexible hinges Translation stage, scanning mirror 30 µm [Sin04]
Electro-thermal actuation Back-bent for power-off engagement 0.6mm / second operation speed Silicon MEMS devices: Linear Stage
1XN V-Groove array Pigtailing with Ferrules Fiber Alignment – “Pigtailing”
Light transmission loss is parabolic with d and q Nonlinearities during Fiber Alignment Alignment Algorithms: • Model Based Alignment • Conical/circular scanning • Gradient Based Methods MBA decreased search time by a factor of 10 [Sin03]
Model-based alignment method Fiber Alignment Algorithms Gradient-based search Conical scanning search
Optical Fiber Insertion Into Ceramic Ferrule Connector hole with fiber Experimental setup
Optical Fiber Insertion Into Ceramic Ferrule Measured Computed Laser intensity around the hole of connector Laser intensity during insertion
Chapter 2 from Slotine & Li text Chapters 1,2 from F. Verlhurst Chapters 1,2 from M. Vidyasagar Textbook Readings for Week 2