Download

1 / 30
300 likes | 564 Vues
YFO0010 Sissejuhatus okeanograafiasse ja limnoloogiasse 8. Ülevaade veekogudes toimuvatest füüsikalistest protsessidest (1). Käsitleme: liikumiste klassifikatsioon põhilised jõud ja dünaamilised bilansid pikad gravitatsioonilised lained mesomastaapsed (sünoptilised) protsessid

E N D
YFO0010 Sissejuhatus okeanograafiasse ja limnoloogiasse 8. Ülevaade veekogudes toimuvatest füüsikalistest protsessidest (1)
Käsitleme: • liikumiste klassifikatsioon • põhilised jõud ja dünaamilised bilansid • pikad gravitatsioonilised lained • mesomastaapsed (sünoptilised) protsessid • ääremerede ja rannikumere suuremastaabilised protsessid
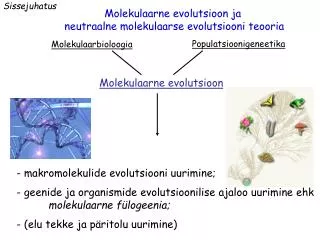
atmosfäär Klimaatilised kineetilise energia spektrid J. Woods (1980) ookean
Energiavood akustilised lained kvaasi-isotroopne turbulents Protsesside klassifikatsioon Monin, 1979 pinnalained inertsvõnkumised tõus-mõõn siselained sundliikumised atmosfääri tsüklonitest vertikaalne mikro-struktuur sesoonsed muutused püsihoovused sünoptilised keerised, frondid klimaatilised muutused
Põhilised jõud ja dünaamilised bilansid
Hüdrostaatiline tasakaal Kordus loengust nr 1
Rõhu gradiendid barotroopne Horisontaalne rõhu gradient sõltub etteantud sügavusel vee tiheduseρ ja veetaseme ξ gradientidest. Kui tihedus on konstantne, siis p = ρg(h+ξ) ja rõhu gradient on määratud veetaseme gradiendiga Tiheduse muutusi võib sageli vaadelda kahekihilises lähenduses, st mõlemas kihis on tihedus konstantne, kuid püknokliini sügavus h muutub. Barotroopsed liikumised: tiheduse horisontaalgradient puudub (vertikaalne gradient on lubatud) ja rõhu gradient tuleneb veetaseme gradiendist. Barokliinsed liikumised:nii tihedus kui ka veetase põhjustavad rõhu gradienti. barokliinne (normaalne) barokliinne (sügavad ülevoolamised)
ilmneb Maa pöörlemise tõttu • on risti kiirusvektoriga • kallutab põhjapoolkeral paremale • ekvaatoril puudub • võimaldab geostroofilist tasakaalu • võimaldab inertsvõnkumisi • Mõju väljendab Coriolis’e parameter • f = 2Ω sin φ , • Ω - Maa nurkkiirus, φ - geograafiline laius • Kiirusvektor pöörleb päripäeva perioodiga • laiusel 600 N • Inertsperiood sageli domineerib kiirusmõõtmiste andmetes Coriolis’e kiirendus “karussell”
Geostroofiline tasakaal rõhugradiendi jõud kiirus Coriolis’e jõud
Triivhoovused: Ekmani spiraal Nansen märkas 1890-ndatel, et triivhoovused on tuule suunast 200-400 paremale. Ekman leidis selgituse: hõõrdejõud on tasakaalus Coriolis’e jõuga. “Puhtas” triivhoovuses (ei arvesta horisontaalseid muutusi) kiirusvektor on veepinnal pööratud tuule suunast 450 paremale (põhjapoolkeral). Sügavuse kasvades kiirusvektori moodul kahaneb eksponentsiaalselt, samal ajal vektor ise pöördub edasi paremale. Kiiruse kahanemist iseloomustab Ekmani sügavus mis sõltub turbulentse viskoossuse koefitsiendist ja Coriolis’e parameetrist. Väärtused on tavaliselt vahemikus 10-100 m. Ekmani kihi keskmine transport on pööratud 900 tuule suunast paremale.
Upwelling Ülakihi Ekmani transport on Coriolis’e jõu tõttu pööratud tuule suunast 900 paremale (põhjapoolkeral). Upwelling: Piki randa puhuv tuul võib lükata pinnakihi veed avamere suunas. Ranniku lähedal tõusevad sügavamad veekihid püknokliini (tiheduse hüppekihi) alt veepinnale, asendamaks “ärapuhutud” pinnakihi vett. Downwelling on vastupidine protsess: avamerelt “puhutakse” pinnakihi vesi randa ning püknokliin läheb sügavamale. Upwelling on ajas muutuv protsess. Ta muudab temperatuuri, soolsust, toitaineid jne. Toitainete eufootilisse tsooni kandmise tõttu on upwellingus sageli suurenenud bioproduktsioon. Suurimad muutused toimuvad siis, kui püknokliin tõuseb pinnale.
2D dünaamika: madala vee võrrandid Näited numbrilisest modelleerimisest • kasutatakse • veetase • madala rannikumere tsirkulatsioon, ainelevi jne
Seishid (omavõnkumised) pikas ja kitsas konstantse sügavusega kanalis 1D madala vee võrrandid taanduvad lainevõrrandiks. Kõik lained, sõltumata lainepikkusest, liiguvad ühesuguse faasikiirusega kus g on raskuskiirendus ja H on sügavus. Kanali otstest vesi läbi ei voola ning seal laine peegeldub. Tekivad seisvad lained, kus kanalisse pikkusega L mahub täisarv pool-laineid Võnkumiste moodi number n näitab pool-lainete arvu. Omavõnkumiste periood on lainepikkus/faasikiirus ehk Siin on analoogia näiteks klaverikeele võnkumiste/lainetega. Kiiruse moodid Veetaseme moodid
2D liikuvate lainete jaoks muutub Coriolis’e jõud oluliseks. Dispersiooniseos (sageduse ω sõltuvus lainearvudest k ja l) võtab kuju Positiivsete lainearvude korral (mõlemas suunas perioodiline laineprofiil) ei saa sagedus olla väiksem kui inertssagedus ehk meie laiuskraadidel ei saa periood olla pikem kui inertsperiood ca 14 tundi. Pikema perioodiga lained on võimalikud juhul, kui üks lainearvu ruutudest on negatiivne ehk laine ise on ühes suunas eksponentsiaalse profiiliga. Et laine amplituud oleks lõplik, on amplituud maksimaalne seina (ranna) ääres ning eemaldudes amplituud kahaneb. Kahanemise kiirust näitab barotroopne (“väline”) Rossby deformatsiooniraadius Kelvini lained Kelvini laine kanalis Sein, mille ääres veetaseme kõikumised on maksimaalsed, sõltub laine leviku suunast.
2D seishid, looded ja amfidroomilised süsteemid Looded (tõus-mõõn) tekitatakse Päikese ja Kuu gravitatsioonijõudude poolt, perioodid ca 12 h ja 24 h. Inertsperioodist pikematel perioodidel moodustavad ergutatud lained amfidroomilised süsteemid, nii seishide kui ka loodete jaoks. Kelvini laine faas liigub põhjapoolkera basseinis päripäeva ja seda kirjeldavad samafaasi jooned (co-tidal lines). Veetaseme muutuvaid amplituude kirjeldavad samataseme jooned (co-range lines). Kelvini lainete amplituud on maksimaalne ranna juures, kuid varieerub ühest kohast teise. Samafaasijooned lõikuvad amfidroomilistes punktides, kus amplituud läheb nulliks.
Mesomastaapsed (sünoptilised) protsessid
Mesomastaapne muutlikkus: kvaasigeostroofika Mesomastaapse muutlikkuse põhilised vormid on frondid ja keerised. Nad tekivad suuremastaabilise liikumise barokliinse ebastabiilsuse tõttu. Kõige ebastabiilsem lainepikkus määrab tekkivate mesomastaapsete struktuuride mõõtmed, mida kirjeldab barokliinne (“sisemine”) Rossby deformatsiooniraadius Siin N on stratifikatsioonitugevust iseloomustav ujuvus- (Väisälä) sagedus. Tüüpilised väärtused: atmosfäär - 1000 km, ookean - 50 km, Läänemeri - 5-10 km. Mesomastaapne liikumine on kvaasigeostroofiline, st kiirused on piki isobaare, kuid “mustrid” muutuvad aeglaselt. Seda määrab potentsiaalne pööriselisus (ζ - absoluutne pööriselisus, f - Coriolis’e parameeter, H - sügavus) mis on piki veeosakeste trajektoori jääv suurus. Tekivad Rossby lained (f muutumise tõttu laiuskraadiga, β -efekt) ja topograafilised lained (H muutumise tõttu).
Frondid: suurenenud gradientidega alad Keeris moonutab “malelauda” Kokkujooksvad hoovused - FRONTOGENEES - säilitavad fronti segunemise vastu. Veepinnal kokkujooksev vesi sukeldub pidevuse tõttu. Piki fronti kiirus on geostroofiline
Frontide tüübid termohaliinne front Frondid shelfialadel tiheduslikult kompenseeritud front Frondi generatsioon segunemise tõttu
vertikaalne struktuur tsüklon antitsüklon Mesomastaapsed keerised Austraalia ja California lähedal
Mere veevahetus, Knudseni bilanss Kordus loengust nr 1
Veevahetus seotud pöörlevates basseinides Vooluhulk üle pöörleva künnise (Whitehead et al., 1974) kus pöörlev kontroll kui • tuuletransport Ekmani kihis kompensatsioonivool alumises kihis • vertikaalne transport pidevuse tõttu peab olema tasakaalustatud halokliini erosiooniga • halokliinis toimub segunemine eelkõige siselainete tõttu
Estuaar lehtersuue, suure jõe sügav mere poole laienev suue või kitsas suudmelaht Estuaar on üleminekuala jõe suudme ja soolase avamere vahel ning olulise tingimusena estuaari soolsus peab erinema avamere soolsusest. Estuaarid on sageli tekkinud jõe suudmeala erosiooni teel tõusu-mõõna mõjul. Hüdrodünaamika seisukohalt on tähtis soolsuse ja tiheduse gradient jõe (või jõgede) mõjualast avamere suunas ning seetõttu on magevee suure juurdevooluga ääremered (sh Läänemeri) ning lahed käsitletavad estuaaridena. Magevee juurdevool ning tiheduse gradiendid tekitavad voolamise. Samal ajal on estuaari stabiilse oleku tagamiseks väga tähtis roll segunemisel. Chesapeak Bay
Estuaaride tüübid soola-keele estuaar osaliselt segunenud estuaar hästi segunenud estuaar