Lock acquisition procedure towards detuned RSE
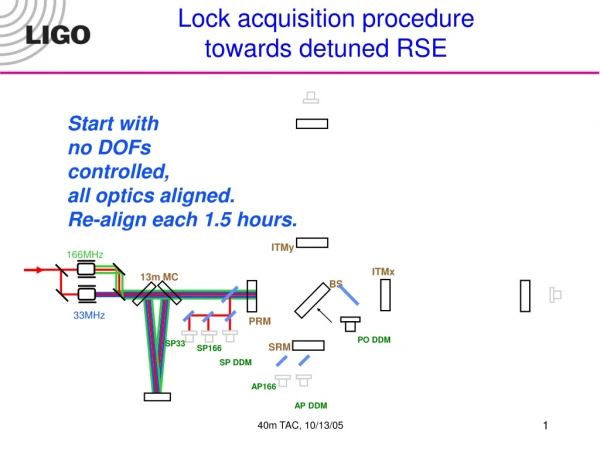
Lock acquisition procedure towards detuned RSE. Start with no DOFs controlled, all optics aligned. Re-align each 1.5 hours. ITMy. 166MHz. ITMx. 13m MC. BS. 33MHz. PRM. PO DDM. SP33. SRM. SP166. SP DDM. AP166. AP DDM. 1/sqrt(TrY).

Lock acquisition procedure towards detuned RSE
E N D
Presentation Transcript
Lock acquisition procedure towards detuned RSE Start with no DOFs controlled, all optics aligned. Re-align each 1.5 hours. ITMy 166MHz ITMx 13m MC BS 33MHz PRM PO DDM SP33 SRM SP166 SP DDM AP166 AP DDM 40m TAC, 10/13/05
1/sqrt(TrY) Lock acquisition procedure towards detuned RSE DRMI + 2arms with offset Average wait : 1 minute (at night, with tickler) ITMy 166MHz ITMx 13m MC 1/sqrt(TrX) BS 33MHz PRM T=7% PO DDM SRM SP166 SP33 T=7% I SP DDM Q AP166 AP DDM 40m TAC, 10/13/05
-1 Lock acquisition procedure towards detuned RSE Scripto-matic: Short DOFs -> DDM DARM -> RF signal CARM -> DC signal 1/sqrt(TrX)+ 1/sqrt( TrY) Discretionary: CARM CARM -> Digital CM_MCL servo + + DARM ITMy 166MHz ITMx 13m MC BS 33MHz PRM PO DDM SRM SP33 SP166 SP DDM To DARM AP166 AP DDM AP166 / (TrX+TrY) 40m TAC, 10/13/05
-1 Lock acquisition procedure towards detuned RSE Reduce CARM offset: Up next: Go to higher ARM power, switch on AC-coupled analog CM_AO servo, using REFL DC as error signal. Locks somewhat stable at 85% of maximum power. RF control of CARM: REFL166 (POX/POY 33 ?) DARM ITMy 166MHz GPR=5 ITMx 13m MC BS SP166 33MHz PRM PO DDM SRM SP33 SP DDM To DARM REFL AP166 AP DDM AP166 / (TrX+TrY) 40m TAC, 10/13/05
Ready for Transition to RF CARM 40m TAC, 10/13/05
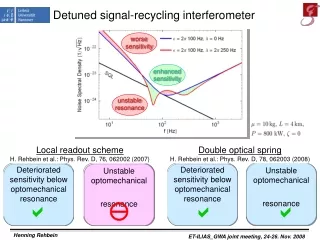
Progress in last 2 months • Use CARM DC signal to creep closer to full arm resonance (signal goes away at resonance) • combined PRC and arm gain as high as 60, 85% of the way to peak, corresponding to offset of 8 pm, assuming arm losses of 200ppm (inferred). • Progress due largely to improvements in loop filtering, to obtain more gain and reduce noise • Also significant improvements in automation of lock procedures. • all DOFs diagonalized (3x3 + 2x2) • Lock is lost because of large frequency noise (presumably) • Effort to reduce frequency noise using CM servo • digital CM servo to MC works well • analog servo using DC signal seems to work, RF under development • Much effort to reduce frequency noise • Noise may be coming from in-vac PZTs 40m TAC, 10/13/05