Download
1 / 57
600 likes | 1.34k Vues
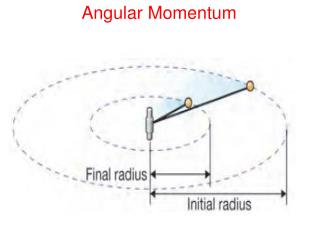
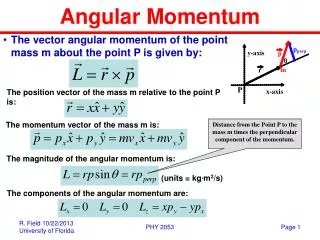
Introduction to Quantum Theory of Angular Momentum. Angular Momentum. AM begins to permeate QM when you move from 1-d to 3-d This discussion is based on postulating rules for the components of AM Discussion is independent of whether spin, orbital angular momenta, or total momentum.

E N D
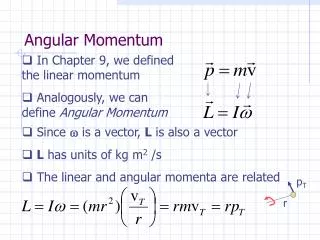
Angular Momentum • AM begins to permeate QM when you move from 1-d to 3-d • This discussion is based on postulating rules for the components of AM • Discussion is independent of whether spin, orbital angular momenta, or total momentum.
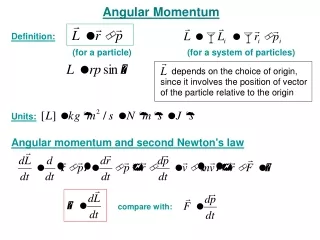
Definition An angular momentum, J, is a linear operator with 3 components (Jx, Jy,Jz) whose commutation properties are defined as
Convention Jz is diagonal For example:
Therefore Where |jm> is an eigenket h-bar m is an eigenvalue For a electron with spin up Or spin down
Definition These Simple Definitions have some major consequences!
THM Proof: QED
Raising and Lowering Operators Lowering Operator Raising Operator
Proof that Jis the lowering operator It is a lowering operator since it works on a state with an eigenvalue, m, and produces a new state with eigenvalue of m-1
[J2,Jz]=0 indicates J2 and Jz are simultaneous observables Since Jx and Jy are Hermitian, they must have real eigenvalues so l-m2 must be positive! l is both an upper and LOWER limit to m!
Let msmall=lower bound on m andlet mlarge=upper bound on m mlarge cannot any larger
Final Relation So the eigenvalue is mlarge*(mlarge +1) for any value of m
Conclusions • As a result of property 2), m is called the projection of j on the z-axis • m is called the magnetic quantum number because of the its importance in the study of atoms in a magnetic field • Result 4) applies equally integer or half-integer values of spin, or orbital angular momentum
Matrix Elements of J Indicates a diagonal matrix
Theorems And we can make matrices of the eigenvalues, but these matrices are NOT diagonal
A matrix approach to Eigenvalues If j=0, then all elements are zero! B-O-R-I-N-G! Initial m j= 1/2 final m What does J+ look like?
Using our relations, Answer: Pauli Spin Matrices
Rotation Matices • We want to show how to rotate eigenstates of angular momentum • First, let’s look at translation • For a plane wave:
A translation by a distance, A, then looks like translation operator Rotations about a given axis commute, so a finite rotation is a sequence of infinitesimal rotations Now we need to define an operator for rotation that rotates by amount, q, in direction of q
So Where n-hat points along the axis of rotation Suppose we rotated through an angle f about the z-axis
What if f = 2p? The naïve expectation is that thru 2p and no change. This is true only if j= integer. This is called symmetric BUT for ½ integer, this is not true and is called anti-symmetric
Using the sine and cosine relation And it should be no surprise, that a rotation of b around the y-axis is
Consequences • If one rotates around y-axis, all real numbers • Whenever possible, try to rotate around z-axis since operator is a scalar • If not possible, try to arrange all non-diagonal efforts on the y-axis • Matrix elements of a rotation about the y-axis are referred to by
And Wigner’s Formula (without proof)
Certain symmetry properties of d functions are useful in reducing labor and calculating rotation matrix
Coupling of Angular Momenta • We wish to couple J1 and J2 • From Physics 320 and 321, we know • But since Jz is diagonal, m3=m1+m2
Coupling cont’d • The resulting eigenstate is called • And is assumed to be capable of expansion of series of terms each of with is the product of 2 angular momentum eigenstates conceived of riding in 2 different vector spaces • Such products are called “direct products”
Coupling cont’d • The separateness of spaces is most apparent when 1 term is orbital angular momentum and the other is spin • Because of the separateness of spaces, the direct product is commutative • The product is sometimes written as
The expansion is written as Is called the Clebsch-Gordan coefficient Or Wigner coefficient Or vector coupling coefficient Some make the C-G coefficient look like an inner product, thus
A simple formula for C-G coefficients • Proceeds over all integer values of k • Begin sum with k=0 or (j1-j2-m3) (which ever is larger) • Ends with k=(j3-j1-j2) or k=j3+m3 (which ever is smaller) • Always use Stirling’s formula log (n!)= n*log(n) Best approach: use a table!!!
What if I don’t have a table? And I’m afraid of the “simple” formula? Well, there is another path… a 9-step path!
9 Steps to Success • Get your values of j1 and j2 • Identify possible values of j3 • Begin with the “stretched cases” where j1+j2=j3 and m1=j1, m2=j2 , and m3=j3, thus |j3 m3>=|j1 m1>|j2 m2> • From J3=J1+J2,, it follows that the lowering operator can be written as J3=J1+J2
9 Steps to Success, cont’d • Operate J3|j3 m3>=(J1+J2 )|j1 m1>|j2 m2> • Use • Continue to lower until j3=|j1-j2|, where m1=-j1 , m2= -j2, and m3= -j3 • Construct |j3 m3 > = |j1+j2 -1 j1+j2-1> so that it is orthogonal to |j1+j2 j1+j2-1> Adopt convention of Condon and Shortley, if j1 > j2 and m1 > m2 then Cm1 m2j1 j2 j3 > 0 (or if m1 =j1 then coefficient positive!)
9 Steps to Success, cont’d • Continue lowering and orthogonalizin’ until complete! Now isn’t that easier? And much simpler… You don’t believe me… I’m hurt. I know! How about an example?
A CG Example: j1 =1/2 and j2 =1/2 Step 1 Step 2 Step 3
Step 7—Keep lowering As low as we go
An aside to simplify notation Now we have derived 3 symmetric states Note these are also symmetric from the standpoint that we can permute space 1 and space 2 Which is 1? Which is 2? “I am not a number; I am a free man!”
The infamous step 8 • “Construct |j3 m3 > = |j1+j2 -1 j1+j2-1> so that it is orthogonal to |j1+j2 j1+j2-1>” • j1+j2=1 and j1+j2-1=0 for this case so we want to construct a vector orthogonal to |1 0> • The new vector will be |0 0>
Performing Step 8 An orthogonal vector to this could be or Must obey Condon and Shortley: if m1=j1,, then positive value j1=1/2 and |+> represents m= ½ , so only choice is