Simplistic Intelligent Vehicle Control Using Real-Time Stereo
110 likes | 535 Vues
Simplistic Intelligent Vehicle Control Using Real-Time Stereo. David Hoffert CS 766 Final Project Fall 2006. Motivation. 43,200 U.S. highways deaths in 2005 Insurance Institute for Highway Safety credits reduction solely to technology Drunken driving rates static 1994 – 2004

Simplistic Intelligent Vehicle Control Using Real-Time Stereo
E N D
Presentation Transcript
Simplistic Intelligent Vehicle Control Using Real-Time Stereo David Hoffert CS 766 Final Project Fall 2006
Motivation • 43,200 U.S. highways deaths in 2005 • Insurance Institute for Highway Safety credits reduction solely to technology • Drunken driving rates static 1994 – 2004 • Driving is purely a rule-based task • And computers don’t drink and drive
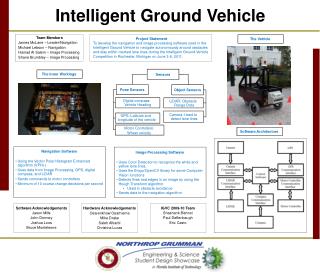
History • 2005 DARPA Grand Challenge • 5 vehicles complete 132-mile desert race course autonomously • But only one uses any kind of computer vision • Others just laser range finders, etc. • 2007 DARPA Urban Challenge • Now traffic, street signs, pedestrians, etc. • Computer vision no longer not an option
Vehicular Computer Vision Tasks • Object recognition • Street signs, to follow the rules • Edge detection • Lane lines and the edge of the road • Stereo/depth mapping • Don’t hit the car/person/object in front of you • Common requirement: real-time!
Real-Time Stereo • Broad assumption for driving: steer away from objects that are close to you • Don’t even have to classify first for this • So all need is foreground vs. background bitmap for each pixel, but need it fast • Kolmogorov, Criminisi, et al, 2005
Their Application: Background Substitution • Exact same concept for stereo navigation • Only difference is how use bitmap information
Real-Time Stereo Algorithm • Energy functions for stereo, color, and contrast • Costs associated with each state, transition • Dynamic Programming to find least cost path
Goals • Implement Kolmogorov real-time stereo algorithm to replicate their results • No remote control car with webcams, just use the sample inputs from website • Proof of concept, gathering appropriate data is a relative waste of time for this project • For each frame, indicate safest driving direction, simple x-histogram of foreground
Future Extensions • For a toy robot, this could potentially be sufficient; on the road, unacceptable • Biggest missing piece: stay on road, in lane • Edge detection, color segmentation • Greater sophistication than “maximize distance from foreground” • Street sign recognition to obey traffic laws