Chapter 7: Sorting
Chapter 7: Sorting. Insertion Sort. Shell Sort. Heap Sort. Merge Sort. Quick Sort. Best Case Sorting Algorithm Analysis. CS 340. Page 112. Sorting. While sorting an array of elements is itself a significant problem, examining this problem serves several other purposes:

Chapter 7: Sorting
E N D
Presentation Transcript
Chapter 7: Sorting • Insertion Sort • Shell Sort • Heap Sort • Merge Sort • Quick Sort • Best Case Sorting Algorithm Analysis CS 340 Page 112
Sorting While sorting an array of elements is itself a significant problem, examining this problem serves several other purposes: • A large variety of sorting algorithms have been developed, so we can explore many algorithm design techniques. • Formal analysis of these algorithms is rather straightforward, so our intuitive feel for time complexity can be expanded. • Worst-case, best-case, and average-case analyses are possible with most of these algorithms, showing us that algorithms that might be advantageous under certain conditions can be quite disadvantageous under other conditions. • Memory limitations can affect the ability to apply certain sorting algorithms, so we can also examine the effects of external system limitations upon algorithm design and implementation. CS 340 Page 113
Insertion Sort Sort the first k elements and then insert the next element by sequentially finding its properly location, sliding each element greater than the next element over by one slot. // Note: The list itself will be the n elements // in A[1] through A[n]. A sentinel value // of INT_MIN will be placed in A[0]. template <classEtype> voidinsertionSort(Etype A[], intn) { intj, p; EtypeitemToInsert; A[0] = MIN_VAL; // Defined elsewhere as smallest // possible value of type Etype. for (p = 1; p < n; p++) { itemToInsert = A[p]; for (j = p; itemToInsert < A[j-1]; j--) A[j] = A[j-1]; A[j] = itemToInsert; } } CS 340 Page 114
Insertion Sort Example JokerPenguinMrFreeze Scarecrow Riddler Catwoman Two-Face Clayface Egghead PoisonIvy Joker PenguinMrFreezeScarecrow Riddler Catwoman Two-Face Clayface Egghead PoisonIvy Joker MrFreeze PenguinScarecrowRiddler Catwoman Two-Face Clayface Egghead PoisonIvy Joker MrFreeze Penguin ScarecrowRiddlerCatwoman Two-Face Clayface Egghead PoisonIvy Joker MrFreeze Penguin Riddler ScarecrowCatwomanTwo-Face Clayface Egghead PoisonIvy Catwoman Joker MrFreeze Penguin Riddler ScarecrowTwo-FaceClayface Egghead PoisonIvy Catwoman Joker MrFreeze Penguin Riddler Scarecrow Two-FaceClayfaceEgghead PoisonIvy Catwoman Clayface Joker MrFreeze Penguin Riddler Scarecrow Two-FaceEggheadPoisonIvy Catwoman Clayface Egghead Joker MrFreeze Penguin Riddler Scarecrow Two-FacePoisonIvy Catwoman Clayface Egghead Joker MrFreeze Penguin PoisonIvy Riddler Scarecrow Two-Face CS 340 Page 115
Insertion Sort Analysis template <classEtype> voidinsertionSort(Etype A[], intn) { intj, p; EtypeitemToInsert; A[0] = MIN_VAL; // 3 TU: 1 multiplication, 1 addition, and 1 // memory access (i.e., assigning to array slot) for (p = 1; p < n; p++) // n-1 iterations, 2 TU each (1 assignment { // or increment and 1 comparison) itemToInsert = A[p]; // 4 TU: 1 multiplication, 1 addition, // 1 memory access, and 1 assignment for (j = p; itemToInsert < A[j-1]; j--) // At most p iterations, 6 TU each // (1 assignment or decrement, // 1 subtraction, 1 multiplication, // 1 addition, 1 memory access, and // 1 comparison) A[j] = A[j-1]; // 7 TU: 1 subtraction, 2 multiplications, 2 additions, // 1 memory access, and 1 assignment A[j] = itemToInsert; // 3 TU: 1 multiplication, 1 addition, 1 assignment } } CS 340 Page 116
Insertion Sort Analysis (continued) Worst case time complexity (i.e., inner loop iterates maximally): which is O(n2). Since there actually is an array requiring this time (i.e., an array with its elements initially in reverse order), the worst case is also (n2). template <classEtype> voidinsertionSort(Etype A[], intn) { intj, p; EtypeitemToInsert; A[0] = MIN_VAL; // 3 TU: 1 multiplication, 1 addition, and 1 // memory access (i.e., assigning to array slot) for (p = 1; p < n; p++) // n-1 iterations, 2 TU each (1 assignment { // or increment and 1 comparison) itemToInsert = A[p]; // 4 TU: 1 multiplication, 1 addition, // 1 memory access, and 1 assignment for (j = p; itemToInsert < A[j-1]; j--) // At most p iterations, 6 TU each // (1 assignment or decrement, // 1 subtraction, 1 multiplication, // 1 addition, 1 memory access, and // 1 comparison) A[j] = A[j-1]; // 7 TU: 1 subtraction, 2 multiplications, 2 additions, // 1 memory access, and 1 assignment A[j] = itemToInsert; // 3 TU: 1 multiplication, 1 addition, 1 assignment } } Best case time complexity (i.e., inner loop iterates minimally): 3+ p=1,n-1(2+4+6)+3 = 6+12(n-1) = 12n-6 time units, which is O(n). Since there actually is an array requiring this time (i.e., an array with its elements initially in order), the best case is also (n). Average case time complexity: The average number of inversions in a list is ¼n(n-1) (an inversion is a pair of array slotsi and j whereI <j, but A[i] > A[j]), and this algorithm only removes one inversion per inner loop iteration. Thus, the average case is (n2), and, by the worst-case argument above, it is also O(n2). CS 340 Page 117
Shell Sort Sort the list in layered sublists, so when sorting the list as a whole, it’s already reasonably close to being sorted. // Note: The list itself will be the n // elements in A[1] through A[n]. // No meaningful value will be // placed in A[0]. voidshellSort(Etype A[], intn) { Etype temp; intinc, i, j; for (inc= n/2; inc> 0; inc/= 2) for (i = inc+ 1; i <= n; i++) { temp = A[i]; for (j = i; j > inc; j -= inc) { if (temp < A[j - inc]) A[j] = A[j - inc]; else break; } A[j] = temp; } } CS 340 Page 118
Shell Sort Example Increment: 6 Increment: 3 Increment: 1 Note that for each increment value, the algorithm performs an insertion sort on every subarray of values spaced increment apart. Also note that this implementation uses increment values n/2, n/4, n/8, …, 1, known as Shell’s increments. A more strategic choice of increment values (i.e., all values relatively prime), would yield better overall performance. CS 340 Page 119
Shell Sort Analysis voidshellSort(Etype A[], intn) { Etype temp; intinc, i, j; for (inc= n/2; inc> 0; inc/= 2) // log(n)-1 iterations; 3 TU each // (1 division, 1 assignment, // and 1 comparison) for (i = inc+ 1; i <= n; i++) // (n-inc) iterations; 3 TU each // (1 addition, 1 assignment, // and 1 comparison) { temp = A[i]; // 4 TU: 1 multiplication, 1 addition, // 1 memory access, 1 assignment for (j = i; j > inc; j -= inc) // (i/inc) iterations; 3 TU each: 1 // subtraction, 1 assignment, and 1 // comparison (with first iteration // having one less subtraction) { if (temp < A[j - inc]) // At most 12 TU: 2 subtractions, 3 A[j] = A[j - inc]; // multiplications, 3 additions, 3 else // memory accesses (including the break; // assignment), and 1 comparison } A[j] = temp; // 3 TU: 1 multiplication, 1 addition, } // and 1 assignment } CS 340 Page 120
Shell Sort Analysis (continued) voidshellSort(Etype A[], intn) { Etypetemp; intinc, i, j; for(inc= n/2; inc> 0; inc/= 2) // log(n)-1 it.@3TU for(i = inc+ 1; i <= n; i++) // (n-inc) it.@3TU { temp = A[i]; // 4TU for (j = i; j > inc; j -= inc) // (i/inc) it.@3TU { if (temp < A[j - inc]) // At A[j] = A[j - inc]; // most else // 12 break; // TU } A[j] = temp; // 3TU } } Worst case time complexity: This is O(n2). There actually is an array requiring this time (i.e., an array with the largest n/2 elements in the even positions and the smallest n/2 elements in the odd positions), so the worst case is also (n2). Best case time complexity (i.e., inner loop iterates once): p=1,log(n)-1(3+i=p+1,n(3+4+3+5+3)) = p=1,logn(3+18(n-p)) = 3logn+18nlogn-9logn(1+logn) time units, which is O(nlogn). Since there actually is an array requiring this time (i.e., an array with its elements initially in order), the best case is also (nlogn). Note: Some other (relatively prime) Shell sort increments have (n1.5) time complexity. CS 340 Page 121
Heap Sort Insert the list into a maximum heap, so removals will involve quick access to the next largest element in the list. template <classEtype> voidpercDown(Etype A[], inti, intn) { intchildIndex; Etype temp = A[i]; for ( ; 2*i <= n; i = childIndex) { childIndex = ((2*i != n) && (A[2*i+1] > A[2*i])) ? (2*i+1) : (2*i); if (temp < A[childIndex]) A[i] = A[childIndex]; else break; } A[i] = temp; } template <classEtype> voidheapSort(Etype A[], intn) { Etype temp; for (int j = n/2; j > 0; j--) // Set list up as percDown(A, j, n); // a max-heap. for (int i = n; i >= 2; i--) { temp = A[1]; A[1] = A[i]; A[i] = temp; // (i.e., deleteMax) percDown(A, 1, i-1); } } CS 340 Page 122
Heap Sort Example Original List: Homer Marge Maggie Bart Lisa Wiggum Burns Moe Barney Flanders KrustyMilhouse Lovejoy Skinner After Converting Into Max-Heap: Wiggum Moe Skinner Lisa Krusty Marge Milhouse Bart Barney Flanders Homer Maggie Lovejoy Burns Rest Of Heap Sort: Skinner Moe Milhouse Lisa Krusty Marge Burns Bart Barney Flanders Homer Maggie Lovejoy Wiggum Moe Lovejoy Milhouse Lisa Krusty Marge Burns Bart Barney Flanders Homer Maggie SkinnerWiggum Milhouse Lovejoy Marge Lisa Krusty Maggie Burns Bart Barney Flanders Homer MoeSkinnerWiggum Marge Lovejoy Maggie Lisa Krusty Homer Burns Bart Barney Flanders MilhouseMoeSkinnerWiggum Maggie Lovejoy Homer Lisa Krusty Flanders Burns Bart Barney MargeMilhouseMoeSkinnerWiggum Lovejoy Lisa Homer Bart Krusty Flanders Burns Barney MaggieMargeMilhouseMoeSkinnerWiggum Lisa Krusty Homer Bart Barney Flanders Burns LovejoyMaggieMargeMilhouseMoeSkinnerWiggum Krusty Burns Homer Bart Barney Flanders LisaLovejoyMaggieMargeMilhouseMoeSkinnerWiggum Homer Burns Flanders Bart Barney KrustyLisaLovejoyMaggieMargeMilhouseMoeSkinnerWiggum Flanders Burns Barney Bart HomerKrustyLisaLovejoyMaggieMargeMilhouseMoeSkinnerWiggum Burns Bart Barney FlandersHomerKrustyLisaLovejoyMaggieMargeMilhouseMoeSkinnerWiggum Bart Barney BurnsFlandersHomerKrustyLisaLovejoyMaggieMargeMilhouseMoeSkinnerWiggum Barney BartBurnsFlandersHomerKrustyLisaLovejoyMaggieMargeMilhouseMoeSkinnerWiggum CS 340 Page 123
Heap Sort Analysis template <classEtype> voidpercDown(Etype A[], inti, intn) { intchildIndex; Etype temp = A[i]; // 4 TU for ( ; 2*i <= n; i = childIndex) // At most log(n-i) iterations; 3 TU each { // except first iteration (1 less assignment) childIndex = ((2*i != n) && (A[2*i+1] > A[2*i])) ? (2*i+1) : (2*i); // At most 16 TU if (temp < A[childIndex]) // At most 11 TU A[i] = A[childIndex]; else break; } A[i] = temp; // 4 TU } // TOTAL FOR PERCDOWN: At most 30log(n-i)+7 TU template <classEtype> voidheapSort(Etype A[], intn) { Etype temp; for (int j = n/2; j > 0; j—-) // n/2 iterations; 3 TU each (except first) percDown(A, j, n); // At most 30log(n-j)+7 TU (by above analysis) for (int i = n; i >= 2; i--) // (n-i iterations; 2 TU each) { temp = A[1]; A[1] = A[i]; A[i] = temp; // 13 TU percDown(A, 1, i-1); // 30log(i-2)+8 TU } } Worst case time complexity: j=1,n/2(3+30log(n-j)+7)-1+i=2,n(2+13+30log(i-2)+8) ≤ (5n + 15nlogn – 1) + (23n – 23 + 30nlogn)= 45nlogn + 28n - 24 time units, which is O(nlogn). Since either changing an array into a max-heap or “re-heapifying” it as maximal elements are removed requires this time, the worst case is also (nlogn). CS 340 Page 124
Merge Sort Recursively sort both halves of the list, and then quickly merge the two sorted halves to form the entire sorted list. ints1 = lower; ints2 = middle + 1; intd = lower; do { if (source[s1] < source[s2]) { dest[d] = source[s1]; s1++; } else { dest[d] = source[s2]; s2++; } d++; } while ((s1 <= middle) && (s2 <= upper)); if (s1 > middle) do { dest[d] = source[s2]; s2++; d++; } while (s2 <= upper); else do { dest[d] = source[s1]; s1++; d++; } while (s1 <= middle); } template <classEtype> voidmergeSort(Etype A[], constintn) { EtypeAcopy[n+1]; intsize; for (int k = 1; k <= n; k++) Acopy[k] = A[k]; order(Acopy, A, 1, size); } template <classEtype> void order(Etype source[], Etypedest[], intlower, intupper) { intmiddle; if (lower != upper) { middle = (lower + upper) / 2; order(dest, source, lower, middle); order(dest, source, middle + 1, upper); merge(source, dest, lower, middle, upper); } } template <classEtype> void merge(Etype source[], Etypedest[], intlower, intmiddle, intupper) { CS 340 Page 125
Merge Sort Example Original List: Mulder Scully Skinner KrycekFrohikeLangly Byers Blevins Matheson Spender Split #1: Mulder Scully Skinner KrycekFrohikeLangly Byers Blevins Matheson Spender Split #2: MulderScullySkinner KrycekFrohikeLanglyByersBlevins Matheson Spender Split #3: MulderScullySkinnerKrycekFrohikeLanglyByersBlevins Matheson Spender Split #4: MulderScullySkinnerKrycekFrohikeLanglyByersBlevinsMatheson Spender Merge #4: MulderScullySkinner FrohikeKrycekLanglyByersBlevins Matheson Spender Merge #3: MulderScullyFrohikeKrycek SkinnerByersLanglyBlevins Matheson Spender Merge #2: FrohikeKrycekMulderScullySkinnerBlevins ByersLangly Matheson Spender Merge #1: Blevins ByersFrohikeKrycekLanglyMatheson MulderScully Skinner Spender CS 340 Page 126
Merge Sort Analysis Worst-case time complexity for applying the merge function to a size-k subarray: M(k) = 18k-7. Time complexity for applying the order function to a size-k subarray: R(k), where R(1)=1 and R(k) = 5+M(k)+2R(k/2) = 18k-2+2R(k/2). This recurrence relation yields R(k) = 18klogk-logk+2. template <classEtype> void merge(Etype source[], Etypedest[], intlower, intmiddle, intupper) { ints1 = lower; ints2 = middle + 1; // 1 TU intd = lower; do { if (source[s1] < source[s2]) // If block: { // 14 TU dest[d] = source[s1]; s1++; } else { dest[d] = source[s2]; s2++; } d++; // 1 TU } while ((s1 <= middle) && // k-m iter. (s2 <= upper)); // @ 3 TU if (s1 > middle) // 1 TU do { dest[d] = source[s2]; // 6 TU s2++; // 1 TU d++; // 1 TU } while (s2 <= upper); // m iter. @ 1 TU else do { dest[d] = source[s1]; s1++; d++; } while (s1 <= middle); } template<classEtype> void order(Etype source[], Etypedest[], intlower, intupper) { intmiddle; if (lower != upper) // 1 TU { middle = (lower + upper) / 2; // 3 TU order(dest, source, lower, middle); // R(k/2) TU order(dest, source, middle + 1, upper); // R(k/2)+1 TU merge(source, dest, lower, middle, upper); // M(k) TU } } Time complexity for applying the mergesort function to a size-n subarray: T(n) = 8n+1+R(n) = 18nlogn+8n-logn+3. template <classEtype> voidmergeSort(Etype A[], constintn) { EtypeAcopy[n+1]; // 1 TU intsize; for (int k = 1; k <= n; k++) // n iter. @ 2 TU Acopy[k] = A[k]; // 6 TU order(Acopy, A, 1, size); // R(n) TU } While this O(nlogn) time complexity is favorable, the requirement of a duplicate array is detrimental to the Merge Sort algorithm, possibly making it less popular than certain alternative choices. CS 340 Page 127
Quick Sort Recursively select a pivot element and quickly place all list elements smaller than the pivot before it in the list and all elements larger than the pivot after it in the list. template <classEtype> voidquickSort(Etype A[], intlower, intupper) { intpivot_point; partition(A, lower, upper, pivot_point); if (lower < pivot_point) quick_sort(A, lower, pivot_point - 1); if (upper > pivot_point) quick_sort(A, pivot_point + 1, upper); } template <classEtype> void partition(Etype A[], intlo, inthi, int&pivot_point) { Etype pivot = A[lo]; while (lo < hi) { while ((pivot < A[hi]) && (lo < hi)) hi--; if (hi != lo) { A[lo] = A[hi]; lo++; } while ((pivot > A[lo]) && (lo < hi)) lo++; if (hi != lo) { A[hi] = A[lo]; hi--; } } A[hi] = pivot; pivot_point = hi; } CS 340 Page 128
Quick Sort Example Scooby Itchy Scratchy Huckleberry Tom Jerry Snoopy Sylvester Speedy Goofy Garfield Mickey Mickey Itchy Garfield Huckleberry Goofy Jerry Scooby Sylvester Speedy Snoopy Tom Scratchy Mickey Itchy Garfield Huckleberry Goofy Jerry Scooby Sylvester Speedy Snoopy Tom Scratchy Jerry Itchy Garfield Huckleberry Goofy MickeyScooby Sylvester Speedy Snoopy Tom Scratchy Jerry Itchy Garfield Huckleberry Goofy MickeyScooby Sylvester Speedy Snoopy Tom Scratchy Goofy Itchy Garfield Huckleberry JerryMickeyScooby Sylvester Speedy Snoopy Tom Scratchy Goofy Itchy Garfield Huckleberry JerryMickeyScooby Sylvester Speedy Snoopy Tom Scratchy Garfield Goofy Itchy Huckleberry JerryMickeyScooby Sylvester Speedy Snoopy Tom Scratchy GarfieldGoofy Itchy Huckleberry JerryMickeyScooby Sylvester Speedy Snoopy Tom Scratchy GarfieldGoofyItchy Huckleberry JerryMickeyScooby Sylvester Speedy Snoopy Tom Scratchy GarfieldGoofyHuckleberry Itchy JerryMickeyScooby Sylvester Speedy Snoopy Tom Scratchy GarfieldGoofyHuckleberryItchyJerryMickeyScooby Sylvester Speedy Snoopy Tom Scratchy GarfieldGoofyHuckleberryItchyJerryMickeyScoobySylvester Speedy Snoopy Tom Scratchy GarfieldGoofyHuckleberryItchyJerryMickeyScooby Scratchy Speedy Snoopy Sylvester Tom GarfieldGoofyHuckleberryItchyJerryMickeyScoobyScratchy Speedy Snoopy Sylvester Tom GarfieldGoofyHuckleberryItchyJerryMickeyScoobyScratchy Speedy Snoopy Sylvester Tom GarfieldGoofyHuckleberryItchyJerryMickeyScoobyScratchySpeedy Snoopy Sylvester Tom GarfieldGoofyHuckleberryItchyJerryMickeyScoobyScratchy Snoopy SpeedySylvester Tom GarfieldGoofyHuckleberryItchyJerryMickeyScoobyScratchySnoopySpeedySylvester Tom GarfieldGoofyHuckleberryItchyJerryMickeyScoobyScratchySnoopySpeedySylvesterTom Note that a more strategic choice for each new pivot position may be possible. CS 340 Page 129
Quick Sort Analysis Time complexity for applying the quickSort: T(n)=T(i)+T(n-i-1)+P(n)+4, where P(n) is the partition time and i is the proper location of the pivot element. Note that T(1)=2 and that P(n) is O(n) since every non-pivot element is examined in turn and, at worst, repositioned, all of which would take constant time for each element. Worst case: Pivot element is always the smallest in the list (i=0) T(n) T(n-1)+cn, a recurrence relation that yields T(n) T(1) + c = 2+c(n+2)(n-1)/2, which is O(n2). Thus, the algorithm is quadratic if the list is already sorted. Best case: Pivot element is always in the middle (i=n/2) T(n) 2T(n/2)+cn, a recurrence relation equivalent to , which telescopes to . So, T(n) 2n+cnlogn, which is O(nlogn). Average case (i is equally likely to be any location) T(n) is (through a rather elaborate analysis, shown in the Weiss text) (nlogn). So, the algorithm is optimal except in certain extreme cases. CS 340 Page 130
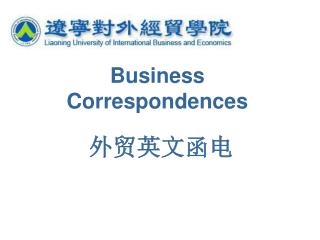
a<b<c<d c<a<b<d d<a<b<c a<b<d<c c<a<d<b d<a<c<b a<c<b<d a<c<d<b a<d<b<c c<d<a<b d<c<a<b a<d<c<b b<a<c<d b<a<d<c b<c<a<d c<b<a<d d<b<a<c b<c<d<a c<b<d<a d<b<c<a b<d<a<c b<d<c<a c<d<b<a d<c<b<a a<b<c<d c<a<b<d c<a<d<b a<c<b<d a<c<d<b c<d<a<b d<a<b<c a<b<d<c d<a<c<b a<d<b<c d<c<a<b a<d<c<b b<a<c<d b<c<a<d c<b<a<d b<c<d<a c<b<d<a c<d<b<a b<a<d<c d<b<a<c d<b<c<a b<d<a<c b<d<c<a d<c<b<a d<a<b<c a<b<d<c d<a<c<b a<d<b<c a<d<c<b b<c<a<d c<b<a<d b<c<d<a c<b<d<a c<d<b<a b<a<d<c d<b<a<c b<d<a<c d<b<c<a b<d<c<a d<c<b<a d<c<a<b b<a<c<d a<b<c<d a<c<b<d a<c<d<b c<a<b<d c<a<d<b c<d<a<b a<c<d<b c<a<b<d d<b<a<c b<d<c<a d<a<b<c d<a<c<b a<d<b<c a<d<c<b b<c<a<d c<b<a<d b<c<d<a c<b<d<a a<b<c<d a<c<b<d c<a<d<b c<d<a<b b<a<d<c b<d<a<c d<b<c<a d<c<b<a a<b<d<c c<d<b<a a<c<b<d d<b<c<a d<c<b<a c<a<d<b c<d<a<b b<a<d<c b<d<a<c a<b<c<d d<a<b<c a<d<b<c b<c<a<d b<c<d<a c<b<a<d c<b<d<a d<a<c<b a<d<c<b c<a<d<b b<a<d<c a<d<b<c a<d<c<b c<b<a<d b<c<a<d c<d<a<b d<a<b<c d<a<c<b b<c<d<a c<b<d<a b<d<a<c A Lower Bound for Comparison-Based Sorting We’ve seen sorting algorithms with time complexity O(nlogn), but is it possible to develop one that’s faster that? If a sorting algorithm is based upon comparisons (i.e., decisions are based upon whether one element is less than another), then how many comparisons are necessary to guarantee a complete sorting? Since there are n! ways to order n elements and each comparison will at best split the possibilities in half, the best that could be achieved would be log(n!). In this example, performing six comparisons in a particular order guarantees a complete sorting of four values. a<b<c<d b<a<c<d c<a<b<d d<a<b<c a<b<d<c b<a<d<c c<a<d<b d<a<c<b a<c<b<d b<c<a<d c<b<a<d d<b<a<c a<c<d<b b<c<d<a c<b<d<a d<b<c<a a<d<b<c b<d<a<c c<d<a<b d<c<a<b a<d<c<b b<d<c<a c<d<b<a d<c<b<a a<b? Note that nn ≥ n! ≥ (n/2)n/2. Since the logarithm is an increasing function, log(nn) ≥ log(n!) ≥ log((n/2)n/2 ), i.e., nlogn ≥ log(n!) ≥ (n/2)log(n/2) = ½nlogn-½n, so log(n!) is (nlogn). c<d? a<c? b<d? If certain branches of the tree had performed different comparisons, the depth of the tree could have been reduced. b<c? a<d? CS 340 Page 131