Download
1 / 6
80 likes | 595 Vues
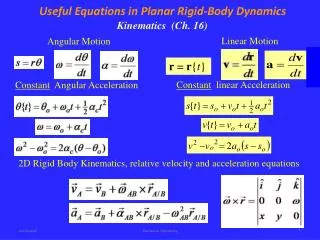
Chapter 17 Planar kinematics of a rigid body: force and motion. STATICS and DYNAMICS- 11 th Ed., R. C. Hibbeler and A. Gupta Course Instructor: Miss Saman Shahid. Moment of Inertia.

E N D
Chapter 17Planar kinematics of a rigid body: force and motion STATICS and DYNAMICS- 11th Ed., R. C. Hibbeler and A. GuptaCourse Instructor: Miss SamanShahid
Moment of Inertia • Since a body has a definite size and shape, an applied non-concurrent force system may cause the body to both translate and rotate. • The translational aspects of the motion are governed by the equ. F=ma. • Rotational aspects caused by a moment M, are governed by an equ. M=Iα. • I is the moment of Inertia and it is a measure of the resistance of a body to angular acceleration in the same way that mass is a measure of the body’s resistance to acceleration. • The flywheel on the engine of this tractor has a large moment of inertia about its axis of rotation. Once it is set to motion, it will be difficult to stop, and this in turn prevent the engine from stalling and instead will allow it to maintain a constant power.
We define the moment of inertia as the integral of the “second moment” about an axis of all the elements of mass dm which compose the body. • (another property of the body, which measures the symmetry of the body’s mass with respect to a coordinate system, is a product of inertia. This property applies to the three-dimensional motion of a body). • When the elemental volume chosen for integration has infinitesimal dimensions in all three directions dV=dxdydz, the moment of inertia of the body must be determined using “triple integration” provided the chosen elemental volume has a differential size or thickness in only one direction. • The body’s moment of inertia about z-axis is:
Procedure for Analysis • To obtain the moment of inertia by integration, we will consider only symmetric bodies having surfaces which are generated by revolving a curve about an axis. • Two types of differential elements can be chosen: (i) Shell Element: If a shell element having a height z, radius r=y, and thickness dV is chosen for integration then the volume dV=(2πy) (z) dy (ii)Disk Element: If a disk element having a radius y and a thickness dz is chosen for integration, then the volume is dV=(πy^2) dz
Parallel-Axis Theorem • If the moment of inertial of the body about an axis passing through the body’s mass center is known, then the moment of inertia about any other parallel axis can be determined by using the parallel-axis theorem. • Here z’-axis passes through the mass center G, whereas the corresponding parallel z- axis lies at a constant distance d away. • Selecting the differential element of mass dm, which is located at point (x’,y’) and using the Pythagorean theorem. • The first integral represents I(G). The second integral equals zero, since the z’-axis passes through the body’s mass center. Third integral represents the total mass m of the body.
Radius of Gyration (k) • Its value has units of length, and when it and the body’s mass m are known, the body’s moment of inertia is determined from the equation. • Note the similarity between the definition of k and r in the equation dI=r^2 (dm)