Collaborative Multi-Agent Systems for Coalition Environments: Functional Architecture Overview
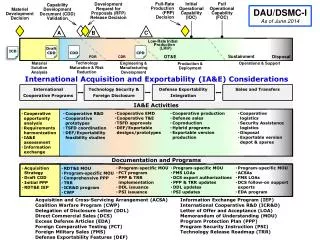
This document outlines the functional architecture of multi-agent systems (MAS) designed for collaborative operations in coalition environments. It highlights four primary threads: Communicator, Planner, Scheduler, and Execution Monitor, each responsible for specific agent tasks. The infrastructure also includes interoperation services, agent mapping, and adjustable autonomy for battlefield scenarios. The focus is on developing sophisticated planning and cooperation capabilities supported by high- and medium-fidelity simulations for search munition control. This approach enhances real-time assessment and coordination among agents.

Collaborative Multi-Agent Systems for Coalition Environments: Functional Architecture Overview
E N D
Presentation Transcript
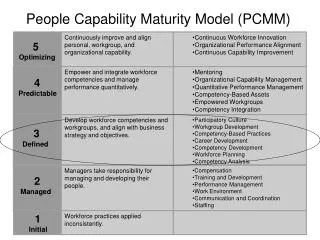
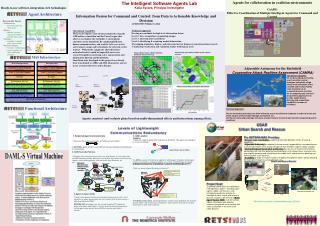
MAS Infrastructure Agents for collaboration in coalition environments Functional Architecture Agent Architecture • Four parallel threads: • Communicator • for conversing with other agents • Planner • matches “sensory” input and “beliefs” to possible plan actions • Scheduler • schedules “enabled” plans for execution • Execution Monitor • executes scheduled plan • swaps-out plans for those with higher priorities MAS Interoperation Translation Services Interoperator Services Interoperation Interoperation Modules Capability to Agent Mapping Middle Agents Capability to Agent Mapping Middle Agent Components Name to Location Mapping Agent Name Service Name to Location Mapping ANS Component Adjustable Autonomy for the Battlefield Cooperative Attack Realtime Assessment (CAMRA) Security Certificate Authority Cryptographic Service Security Security Module Private/Public Keys Performance Services MAS Monitoring Reputation Services Performance Services Performance Service Modules Operational Capability: We are developing and testing search munition control strategies using both a high fidelity 6-dof simulation of the LOCAAS and medium fidelity 6-dof simulation of an unspecified search munition. We are adapting team oriented programming approaches to provide sophisticated planning and cooperation capabilities to teams of munitions. CaveUT Convergent Tools Multi-Agent Management Services Logging Activity Visualization Launching Management Services Logging and Visualization Components Munition simulation OTB simulation ACL Infrastructure Public Ontology Protocol Servers ACL Infrastructure Parser, Private Ontology, Protocol Engine Communications Infrastructure Discovery Message Transfer Communication Modules Discovery Message Transfer Modules MAS Infrastructure Individual Agent Infrastructure Robotic control interface Operating Environment Machines, OS, Network, Multicast Transport Layer, TCP/IP, Wireless, Infrared, SSL Terrain analysis Unreal engine Technical Approach: We are developing techniques to allow wide area search munitions to cooperate in order to locate and attack targets, perform battle damage assessment, etc. Control concepts and prototype interfaces to allow humans to control and monitor cooperating search munitions Search and Rescue Results: TelemetryCommands Video PER Interface State Info Telemetry Commands 1. Hardwired Agent Communications 2. ANS Location Registry Video “I know who I want to speak with, I just need to find them. The agent I am looking for is in my local domain.” Agent Name Server ANS) The ANS is a server that acts as a registry or “white pages” of agents, storing agent names, host machines, and port numbers in its cache. The ANS helps to manage inter-agent communication by providing a mechanism for locating agents. “I know you, the service you provide, and where you are located.” In RETSINA, agents known to each other do not need centralized intermediaries to communicate. State Info Human Environment: disaster area Corky 3. ANS Hierarchy Partners “The agent I am looking for may not be in my local domain, so I will check with the ANS hierarchy partners with whom I am familiar. My partners will forward my request to their known partners, who will search their directories for me.” 4. Multicast Discovery--works best in Local Area Networks (LANs) “Hello, my name is Agent B and my location is Y.” 5. Agent-to-Agent (A2A) “I want to find agents, services and infrastructure beyond my LAN. I don’t know who or where these entities are, but I need to look for them across a Wide Area Network (WAN).” With Multicast Discovery, agent registrations, locations and capabilities are “pushed” to other agents and infrastructure components, which discover each other and avail themselves to each other’s services. RETSINA A2A technology uses the existing Gnutella P2P network to gather information about agents, services and infrastructure components so that agents may connect across WANs to access each other’s services. The Intelligent Software Agents LabKatia Sycara, Principal Investigator Ready-to-use software-integration-web technologies CoABS: Effective Coordination of Multiple Intelligent Agents for Command and Control Information Fusion for Command and Control: from Data to Actionable Knowledge and Decision AFOSR PRET F49640-01-1-0542 • Technical Approach: • Develop new methods for high level information fusion • Level 2: force recognition (recognizing groups) • Level 3: inferring intent and threat • Level 4: identifying & acquiring needed information • Developing simulation, display, and infrastructure for human-system interaction research • Conducting verification and validation studies with human users Operational Capability: We have developed a suite of interacting tools using the OTB military simulation and the Unreal engine that allow us to simulate the warfighter’s environment anywhere on the battlefield. By combining ISR data, human communications, and realistic tasks we can test and evaluate conops and technologies for network centric warfare. Without the complexity allowed by these networked tools it would be impossible to test our research hypotheses involving active annunciation and information filtering and distribution. Simulation tools developed in this project have already been transitioned to AFRL and ARL laboratories and are in use at universities here and in Europe. Automatically generated by CMU’s terrain analysis software Subject Matter Expert’s MCOO (Modified Combined Obstacle Overlay) Agents construct and evaluate plans based on multi-dimensional effects and interactions among effects. USARUrban Search and Rescue • The RETSINA MAS Provides: • Dynamic team coordination, supporting teamwork between entities of varying capabilities; • Adjustable Autonomyfor adaptively sharing control, responsibilities, and commitments at all task abstraction levels and by all types of team members (agents, robots, people); • Abstraction-based tiered robot architecturethat consists of incremental functional abstractions with real-time behavior based controllers at the lowest level, executive near-term explicit reasoning and scheduling at the middle level, and declarative planning and communication at the top level; • Scalability to larger or smaller numbers of robotic and software agents without affecting the team goal through loss of coordination, etc. Project Goal: To develop hybrid teams of autonomous heterogeneous agents—including cyber agents, robots, and humans—that intelligently coordinate and plan to accomplish urban search and rescue in disaster situations. We envision a Multi-Agent System (MAS) in which humans, agents, and robots work together seamlessly to provide aid as quickly and safely as possible in the event of an urban disaster. http://www-2.cs.cmu.edu/~softagents/project_grants_NSF.html