Download
1 / 16
160 likes | 185 Vues
Explore the frequency response properties, equations, and examples of Fourier Transformation in discrete systems. Learn about sampling, filters, and digital signal processing fundamentals.

E N D
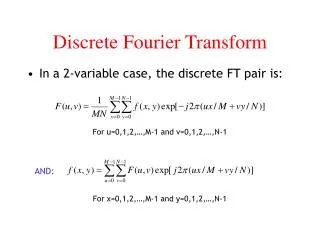
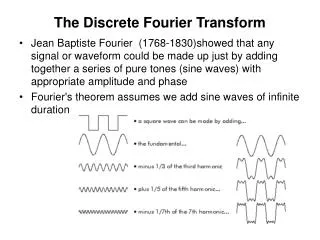
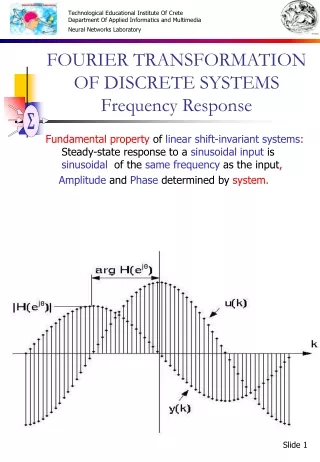
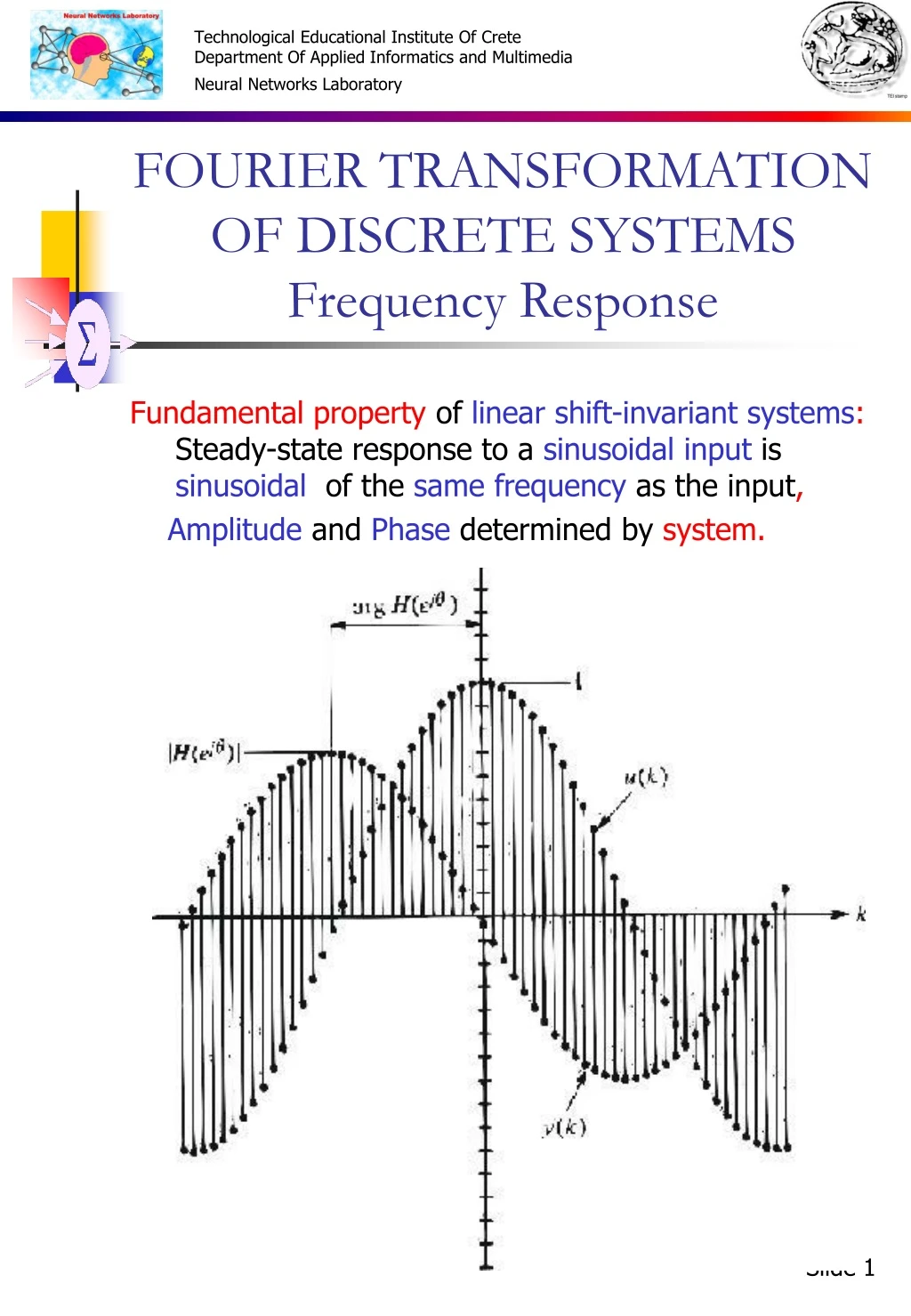
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSFrequency Response Fundamental property of linear shift-invariant systems: Steady-state response to a sinusoidal input is sinusoidal of thesame frequencyas the input, Amplitudeand Phasedetermined by system.
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSFrequency Response • Input sequence of the form: • The output is identical to the input with a complex multiplier H(e jω) • H(e jω) is called the frequency response of the system: gives the transmission of the system for every value of ω.
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSFrequency Response Example: Calculate thefrequency responseof the following FIR filter if h(k)=1/4 k=0,1,2,3 y(k) = h(0)u(k)+h(1)u(k-1)+h(2)u(k-2)+h(3)u(k-3)
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSFrequency Response Properties Frequency responseis a periodic function ofω(2π) SinceH(ejω) is periodic only2πlength in needed. Generally the interval 0<ω<2π is used. Real h(n) most common case • Magnitude of H(ejω) is symmetric over2π • Phase of H(ejω) is antisymmetric over2π Only the interval 0<ω<π is needed.
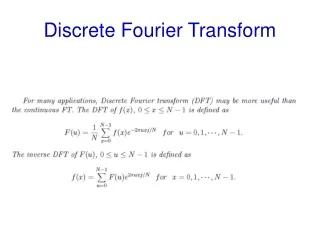
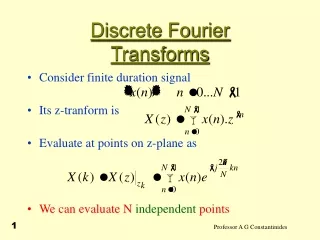
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSFourier Transform of Discrete Signals Fourier Transform of discrete time signal: The series does not always converge. Example: x(n)unit step,real exponential sequence There is convergence if: The frequency response of a stable system will always converge Inverse of thefrequency response- impulse response:
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSFourier Transform of Discrete Signals Example: Calculate the impulse response, of an ideal low-pass filter, if thefrequency responseis: The system is not causal and unstable • This system can not be implemented.
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSIntroduction to Digital Filters Filters: A system that selectively changes the waveshape, amplitude-frequency, phase-frequency characteristics of a signal Digital Filters: Digital Input – Digital Output • Linear Phase-Τhe frequency response has the form: • α:real number, A(ejω): real function of ω • Phase:
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSUnits of Frequency Express frequency responsein terms frequency units involving sampling interval T. Equations are: H(ejωΤ)is periodic inωwith period2π/Τ ω:radians per second Replace ωwith 2πf, frequency f: hertz Example: Sampling frequency f=10 KHz, T= 100 μs • H(ej2πfΤ) is periodic in f with period10 KHz • H(ejωΤ)is periodic inωwith period20000π rad/sec
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSReal-time signal processing Input Filter: Analogue,to bandlimit analogue input signalx(t) – no aliasing ADC: Converts x(t) into digital x(n) build-in sample and hold circuit Digital Processor:microprocessor – Motorola MC68000 or DSP – Texas Instrument TMS320C25 • The Bandlimited signalis sampled Analog Discrete time continuous amplitude signal • Amplitude is quantized into 2B levels (B-bits) • Discrete Amplitude is encoded into B-bits words.
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSSampling Digital signal x(nT) produced by sampling analog x(t) x(n) = xa(nTs) Ts(sampling rate) = 1/Fs (sampling frequency) Initially, x(n) is multiplied (modulated)with a summation of delayed unit-impulse yields the discrete time continuous amplitude signal xs(t):
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSSampling Fourier transformrelations forx(t): Discrete–time signal transform relations are: The relationship between the two transforms is: Sum of infinite number of components of the frequency response of the analog waveform
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSSampling If analog frequency is bandlimited: Then: Digital frequency response is related in a straightforward manner to analog frequency response
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSSampling The shifting of information from one band of frequency to another is called aliasing. It is controlledby the sampling rate 1/T How high the sampling frequency should be? Sampling Theorem Shannon Theorem:If x(t) has fmaxas its highest frequency, and x(t) is periodically sampled so that T<1/2 fmax then x(t) can be reconstructed fmax Nyquist frequency In order to reduce the effects of aliasing anti-aliasing filtersare used to bandlimit x(t) They depend on fmax
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSDAC The basic DAC accepts parallel digital data Produces analog output using zero order hold The ideal DAC should have an ideal low-pass filter The system is not causal and unstable
FOURIER TRANSFORMATION OF DISCRETE SYSTEMSDAC Since it is impossible to implement an ideal lowpass filter zero order hold is used instead. Its impulse response is: The frequency response is: