Download
1 / 50
540 likes | 838 Vues
2. Analiza SRA liniare, continue şi monovariabile. Bucla de reglare convenţională. Perturbaţii: p : perturbaţii de sarcină: frecvenţe joase n : zgomotul de măsură: frecvenţe înalte. Proprietăţi: -stabilitate; -urmărire a referinţei ; -rejecţia perturbaţiilor de sarcină ;

E N D
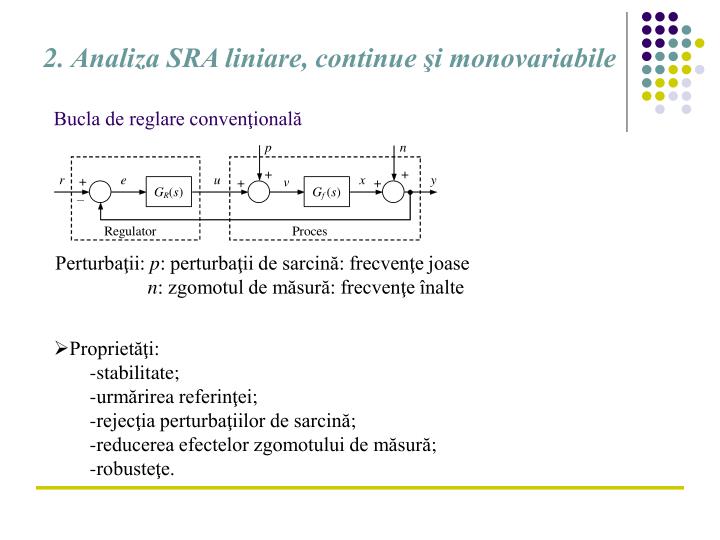
2. Analiza SRA liniare, continue şi monovariabile Bucla de reglare convenţională Perturbaţii: p: perturbaţii de sarcină: frecvenţe joase n: zgomotul de măsură: frecvenţe înalte • Proprietăţi: • -stabilitate; • -urmărirea referinţei; • -rejecţia perturbaţiilor de sarcină; • -reducerea efectelor zgomotului de măsură; • -robusteţe.
2.1 Funcţii de transfer (f.d.t) Bucla de reglare: 3 semnale externe: r,p,n 3 semnale de interes: x, y, u. (2.1)
2.1 Funcţii de transfer (f.d.t) 4 f.d.t • (2.1) f.d.t. în circuit închis f.d.t. în circuit închis in raport cu perturbatia p funcţia de sensibilitate funcţia de sensibilitate înraport cuzgomotul n (2.2) (2.3)
2.1 Funcţii de transfer (f.d.t) • F.d.t în buclă deschisă (2.4) (2.5) (2.6) (2.7)
2.2 Criterii de performanţă • Proprietăţi: • -stabilitate; • -urmărirea referinţei; • -rejecţia perturbaţiilor de sarcină; • -reducerea efectelor zgomotului de măsură; • -robusteţe.
2.2.1 Stabilitatea şi robusteţea la variaţiile parametrilor procesului (2.8) • Criteriul lui Nyquist de stabilitate (-1, j0) : punct critic rezerva de stabilitate
2.2.1 Stabilitatea şi robusteţea la variaţiile parametrilor procesului • Marginea de amplificare (2.9) • Marginea de fază (2.10) • Marginea de modul (2.11) Valorile tipice: (2.12)
2.2.2 Perturbaţii • Rejectia perturbaţiilor de sarcină • Perturbaţie constantă: (2.13) (2.14)
2.2.2 Perturbaţii • Rejecţia perturbaţiilor de sarcină (2.15) (2.16) (2.17) (2.18)
2.2.2 Perturbaţii • Zgomotul de masură • Semnale analogice de 10 V • Zgomotul de masură 1mV • CAN / CNA: 12 biti • 1 bit satureazău pentru • .
2.2.2 Perturbaţii • Zgomotul de masură (2.19) : marginea de amplificare la f.î. a regulatorului
2.2.3 Urmărirea referinţei • Performanţe in domeniul timp: • Timpul de cresteretc: • Durata regimuluitranzitoriu: • Suprareglarea: • Gradul de amortizare:
2.2.3 Urmărirea referinţei • Eroarea de regim stationar: (2.20) Eroarea la poziţie Eroarea la viteză (2.21)
2.2.3 Urmărirea referinţei (2.22) sau • Problema reglării valoare finită repartitia poli zerouri (2.23) (2.24)
2.2.3 Urmărirea referinţei (2.25)
2.2.4 Criterii globale de performanţe Răspuns la semnal treaptă (r sau p) cu IE (Integrated Error) (2.26) • Răspunsul indicial la referinţă aperiodic; b) eroarea de reglare
2.2.4 Criterii globale de performanţe Evoluţia erorii (a) şi modulului erorii (b) pentru un sistem oscilant (IAE) Integrated Absolute Error (2.27) (2.28) (ISE) Integrated Square Error
2.2.4 Criterii globale de performanţe (ITAE) Integrated Time weighted Absolute Error (ISTE) Integrated Squared Time weighted Error (IST2E) Integrated Squared Time - squared weighted Error (WQE) Weighted Quadratic Error
2.3 Calculul indicilor de performanţă (2.31) Performanţe pentru: Componenta forţată a răspunsului sistemului: (2.32) (2.33) (2.34)
2.3 Calculul indicilor de performanţă componenta permanentă a răspunsului: componenta tranzitorie SRA stabile
2.3.1 Calculul performanţelor pe baza răspunsului indicial componentă staţionară r = treaptă unitară: regimul permanent regimul staţionar m poli reali n poli complex conjugaţi Răspunsul indicial:
2.3.1 Calculul performanţelor pe baza răspunsului indicial • Sistemul de ordinul întâi ; un pol real T1 este ct. de timp a sistemului Răspunsul indicial: L.d.t: : Răspunsul indicial (a) şi l.d.t. (b)
2.3.1 Calculul performanţelor pe baza răspunsului indicial Pe baza răspunsului indicial se pot calcula următoarele performanţe: • durata regimului tranzitoriu: • suprareglarea: • timpul de creştere: • erori staţionare: Pe baza răspunsului la frecvenţă se pot calcula următoarele performanţe: • marginea de modul: • marginea de amplitudine: • marginea de fază: • frecvenţa de tăiere:
2.3.1 Calculul performanţelor pe baza răspunsului indicial • Sistemul de ordinul II Raspunsul indicial: a) Raspunsul indicial b) Locul de transfer
2.3.1 Calculul performanţelor pe baza răspunsului indicial Pe baza răspunsului indicial se pot calcula următoarele performanţe: • durata regimului tranzitoriu: • suprareglarea: • timpul de creştere: • erori staţionare:
2.3.1 Calculul performanţelor pe baza răspunsului indicial Pe baza răspunsului la frecvenţă se pot calcula următoarele performanţe: • marginea de amplitudine: • marginea de fază: • marginea de modul: - pulsatia: • frecvenţa de tăiere: • largimea de banda: • pulsatia de rezonanta: - valoarea de vârf a modulului:
ρ γ c = 0 Conturul de integrare 2.4 Calculul performanţelor pe baza răspunsului la frecvenţă 2.4.1. Determinarea răspunsului indicial (1) C (2) (3) G0(0)
2.4.1. Determinarea răspunsului indicial (4) (5) (6)
2.4.1. Determinarea răspunsului indicial (7) (i) (ii) (8) (9)
P(w) w 2.4.1. Determinarea răspunsului indicial • Forme ale răspunsului indicial in funcţie de P(ω) (10) (11) 3 forme tipice ale P() Pentru a determina evoluţia lui y(t) între 0 şi P(0) P() (12) (a)
2.4.1. Determinarea răspunsului indicial • Forme ale răspunsului indicial in funcţie de P(ω) (13) Notaţie: (14) ≤0 ≤0 (15) ≥0 ≥0 (16)
2.4.1. Determinarea răspunsului indicial • Forme ale răspunsului indicial in funcţie de P(ω) Notaţie: (17) (18)
2.4.1. Determinarea răspunsului indicial • Forme ale răspunsului indicial in funcţie de P(ω) (b) (19)
2.4.1. Determinarea răspunsului indicial • Forme ale răspunsului indicial in funcţie de P(ω) (20) (21) (c)
2.4.1. Determinarea răspunsului indicial • Forme ale răspunsului indicial in funcţie de P(ω) (22) (23) (24) (25) (26)
2.4.1. Determinarea răspunsului indicial • Forme ale răspunsului indicial in funcţie de P(ω) (27) (28) :majorare (29) (30)
2.4.1. Determinarea răspunsului indicial • Forme ale răspunsului indicial in funcţie de P(ω) Minorare=> (31) (32)
P(w) P(0) w w0 wd 0 2.4.2 Metoda trapezelor (33) (34) (35)
2.4.2 Metoda trapezelor Notaţii: => timpul relativ (36) => pulsaţia relativă de frângere =>răspuns indicial normat
2.4.3. Aprecierea performanţelor de regim tranzitoriu • Cercurile M=ct. şi P=ct. * **
2.4.3. Aprecierea performanţelor de regim tranzitoriu • Cercurile M=ct. M=ct. Cerc:
Im M=1 M>1 M<1 w4 w5 w6 w7 w3 Re (-1,j0) 0 -1/2 w2 w1 G (jw) d 2.4.3. Aprecierea performanţelor de regim tranzitoriu • Cercurile M=ct.
2.4.3. Aprecierea performanţelor de regim tranzitoriu • Cercurile P=ct. P=ct. Cerc:
2.4.3. Aprecierea performanţelor de regim tranzitoriu • Cercurile P=ct.
2.4.3. Aprecierea performanţelor de regim tranzitoriu • Suprareglarea peste cercurile P=ct. (problema reglării)
2.4.3. Aprecierea performanţelor de regim tranzitoriu • Durata regimului tranzitoriu Trapezul reprezentativ
2.4.3. Aprecierea performanţelor de regim tranzitoriu • Durata regimului tranzitoriu tt Pt. c
2.4.3. Aprecierea performanţelor de regim tranzitoriu • Gradul de amortizare indicele de oscilaţie element de ordin II ()
2.4.3. Aprecierea performanţelor de regim tranzitoriu • Gradul de amortizare Se determină din: peste cercurile M=ct.
2.4.3. Aprecierea performanţelor de regim tranzitoriu • Gradul de amortizare Im M = 1 M < 1 M >1 Mv Re 0 Gd(jw)