Image Restoration
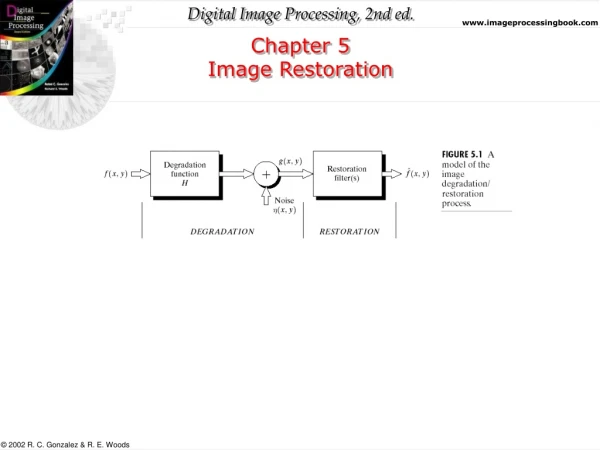
Image Restoration. Introduction. Image restoration concerns the removal or reduction of image degradation that have occurred during the acquisition of the image Degradation due to noise, optical effects Using neighborhood operations, frequency domain processes. Model. Spatial domain


Image Restoration
E N D
Presentation Transcript
Introduction • Image restoration concerns the removal or reduction of image degradation that have occurred during the acquisition of the image • Degradation due to noise, optical effects • Using neighborhood operations, frequency domain processes.
Model • Spatial domain • Frequency domain
Noise • Define noise to be any degradation in the image signal caused by external disturbance • Salt and Pepper Noise • Gaussian Noise • Speckle Noise • Periodic Noise
30% original 10% Salt and Pepper Noise • Also called impulse noise, shot noise, or binary noise • This kind of noise is caused by sharp, sudden disturbances in the image signal, its appearance is randomly scattered by white or black (or both) pixels over the image
Mean = 0 Variance = 0.01 original Gaussian Noise • Gaussian noise is an idealized form of white noise • I + N • I represents image, N represents Gaussian Noise • I is a matrix of our image, N is a matrix whose elements are normally distributed
Speckle Noise • Speckle noise can be modeled by random values multiplied by pixel values • I (1+N) • I is the image matrix, N consists of normally distributed values with mean 0 original Variance = 0.01
Periodic Noise • If the image signal is subject to a periodic, rather than a random disturbance, we might obtain an image corrupted by periodic noise original
Cleaning Salt and Pepper Noise • Low-Pass Filtering • Salt and pepper noise are high-frequency components of an image • The low-pass filter (e.g. average filter) could reduce them original S&P noise (0.1) 3*3 mask 7*7 mask
Cleaning Salt and Pepper Noise • Median Filtering • Median filter is a nonlinear spatial filter, using a 3*3 mask, the output value is the median of the values in the mask 50 52 57 58 60 61 63 65 90 S&P noise (0.1) 3*3 size
Median Filtering & Average Filtering S&P noise (0.4) Average (3*3) Average (5*5) Median (3*3) Median (5*5)
Rank-Order Filtering • Median filtering is a special case of rank-order filtering • Rank-order filter take the nth value for some predetermined value of n (rather than take the median of a set). • There is only one reason for using rank-order filtering instead of median filtering, that is, it allows us to choose the median of nonrectangular masks.
An Outlier Method • Applying the median filter is a slow operation • To overcome this difficulty, [Pratt] proposed the use of cleaning salt and pepper noise by treating noisy pixels as outliers • (1) Choose a threshold value D. • (2) For a given pixel, compare its value p with the mean m of the values of its eight neighbors. • (3) If |p-m| > D, then classify the pixel as noisy, otherwise not. • (4) If the pixel is noisy, replace its value with m; otherwise leave its value unchanged.
S&P noise (0.1) S&P noise (0.4) D = 0.2 D = 0.4 D = 0.2 D = 0.4
Cleaning Gaussian Noise • Image Averaging • If we have 100 copies of our image, each with noise then the ith noisy image will be: • M+Ni • M is the matrix of original values, and Ni is a matrix of normally distributed random values with mean 0. Because Ni is normally distributed with mean 0, so the mean of all the Ni’s will be close to zero
10 images 100 images
Cleaning Gaussian Noise • Average Filtering • If the Gaussian noise has mean 0, then we expect that an average filter would average the noise to zero • The larger the size of the filter mask , the closer to zero 3*3 mask 5*5 mask
Variance = 1000 Arithmetic mean filtering Geometric mean filtering Adaptive filtering
Removal of Periodic Noise • Band reject filtering • Filter consisting of 1s with a ring of 0s. • Notch filtering • With a notch filter we simply make the rows and columns of the spikes 0
Inverse Filtering • The trouble is that some elements of the Butterworth matrix are very small, so dividing produces very large values that dominate the output (1) apply a low-pass filter L to the division: this can eliminate very low (or zero) values
Radius = 40 Radius = 60 Radius = 80 Radius = 100
Inverse Filtering (2) using constrained division, we choose a threshold value d, and if |F(i,j)|<d, we don’t perform a division, but just keep our original value d = 0.01 d = 0.005 d = 0.001 d = 0.0005
Motion Deblurring The removal of blur caused by motion to be a special case of inverse filtering Straight division Constrained division d = 0.02