Network Utility Maximization over Partially Observable Markov Channels
200 likes | 363 Vues
This paper explores network utility maximization in systems governed by partially observable Markov channels and restless multi-armed bandits. The authors, Chih-Ping Li and Michael J. Neely, present novel techniques to characterize the operational capacity region and develop utility maximization strategies for channel scheduling. Key contributions include inner bounds on capacity regions and methods for managing uncertainty in channel states, aiming to enhance throughput in multi-user wireless systems. The results have significant implications for the design of adaptive communication protocols.

Network Utility Maximization over Partially Observable Markov Channels
E N D
Presentation Transcript
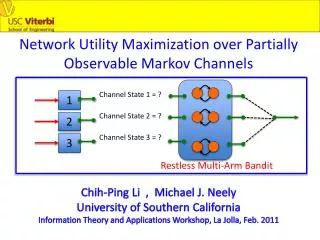
Network Utility Maximization over Partially Observable Markov Channels Channel State 1 = ? 1 Channel State 2 = ? 2 Channel State 3 = ? 3 Restless Multi-Arm Bandit Chih-Ping Li , Michael J. Neely University of Southern California Information Theory and Applications Workshop, La Jolla, Feb. 2011
This work is from the following papers:* • Li, Neely WiOpt 2010 • Li, Neely ArXiv 2010, submitted for conference • Neely Asilomar 2010 • Chih-Ping Li is graduating and is currently looking for • post-doc positions! • *The above paper titles are given below, and are available at: • http://www-bcf.usc.edu/~mjneely/ • C. Li and M. J. Neely “Exploiting Channel Memory for Multi-User Wireless Scheduling without Channel Measurement: Capacity Regions and Algorithms,” Proc. WiOpt 2010. • C. Li and M. J. Neely, “Network Utility Maximization over Partially Observable Markovian Channels,” arXiv:1008.3421, Aug. 2010. • M. J. Neely, “Dynamic Optimization and Learning for Renewal Systems,” Proc. Asilomar Conf. on Signals, Systems, and Computers, Nov. 2010.
S1(t) = ? 1 S2(t) = ? 2 S3(t) = ? 3 Restless Multi-Arm Bandit with vector rewards εi Process Si(t) for Channel i: ON OFF δi • N-user wireless system. • Timeslots t in {0, 1, 2, …}. • Choose one channel for transmission every slot t. • Channels Si(t) ON/OFF Markov, current states Si(t) unknown.
S1(t) = ? 1 S2(t) = ? 2 S3(t) = ? 3 Restless Multi-Arm Bandit with vector rewards εi Process Si(t) for Channel i: ON OFF δi • Suppose we serve channel i on slot t:
0 S1(t) = ? 1 = r(t) 1 S2(t) = ? 2 S3(t) = ? 0 3 Restless Multi-Arm Bandit with vector rewards εi Process Si(t) for Channel i: ON OFF δi • Suppose we serve channel i on slot t: • If Si(t)=ON ACK Reward vector r(t) = (0, …, 0, 1, 0, …, 0).
0 S1(t) = ? 1 = r(t) 0 S2(t) = ? 2 S3(t) = ? 0 3 Restless Multi-Arm Bandit with vector rewards εi Process Si(t) for Channel i: ON OFF δi • Suppose we serve channel i on slot t: • If Si(t)=ON ACK Reward vector r(t) = (0, …, 0, 1, 0, …, 0). • If Si(t)=OFF NACK Reward vector r(t) = (0, …, 0, 0, 0, …, 0).
S1(t) = ? 1 S2(t) = ? 2 S3(t) = ? 3 Restless Multi-Arm Bandit with vector rewards εi Process Si(t) for Channel i: ON OFF δi Let ωi(t) = Pr[Si(t) = ON]. If we serve channel i, we update: ωi(t+1) = { (1-εi) if we get “ACK” { δi if we get “NACK”
S1(t) = ? 1 S2(t) = ? 2 S3(t) = ? 3 Restless Multi-Arm Bandit with vector rewards εi Process Si(t) for Channel i: ON OFF δi Let ωi(t) = Pr[Si(t) = ON]. If we do not serve channel i, we update: ωi(t+1) = ωi(t)(1-εi) + (1-ωi(t))δi
L We want to: Characterize the capacity region Λ of the system. Λ = { all stabilizable input ratevectors(λ1, ..., λΝ)} = { all possible time average reward vectors } 2) Perform concave utility maximization over Λ. Maximize: g(r1, ..., rΝ) Subject to: (r1, ..., rΝ) in Λ λ1 1 λ2 2 λ3 3
What is known about such systems? • If (S1(t), …, SN(t)) known every slot: • Capacity Region known [Tassiulas, Ephremides 1993]. • Greedy “Max-Weight” optimal [Tassiulas, Ephremides 1993]. • Capacity Region is same, and Max-Weight works, for both iid vectors and time-correlated Markov vectors. • 2) If (S1(t), …, SN(t)) unknown but iidover slots: • Capacity Region is known. • Greedy Max-Weight decisions are optimal. • [Gopalan, Caramanis, ShakkottaiAllerton 2007] • [Li, Neely CDC 2007, TMC 2010] • 3) If (S1(t), …, SN(t)) unknown and time-correlated: • Capacity Region is unknown. • Seems to be an intractable multi-dimensional Markov Decision Problem (MDP). Current decisions affect future (ω1(t), …, ωN(t)) probability vectors.
Our Contributions: 1) We construct an operational capacity region (inner bound). Our Contributions: 1) We construct an operational capacity region (inner bound). 2) We construct a novel frame based technique for utility maximization over this region.
Assume channels are positively correlated: εi + δi ≤ 1. εi 1-εi ON OFF δi δi ωi(t) • After “ACK” ωi(t) > Steady state Pr[Si(t) = ON]= δi/(δi+εi) • After “NACK” ωi(t) <Steady state Pr[Si(t) = ON]= δi/(δi+εi) • Gives good intuition for scheduling decisions. • For Special Case of channel symmetry (εi = ε, δi= δ for all i), • “round-robin” maximizes sum output rate. • [Ahmad, Liu, Javidi, Zhao, Krishnamachari, Trans IT 2009] • How to use intuition to construct a capacity region (for possibly asymmetric channels)? t
Inner Bound on Λint (“Operational Capacity Region”): λ1 1 λ2 2 Λint = Convex hull of allrandomized round-robin policies. λN N Every frame, randomly pick a subset and an orderingaccording to some probability distribution over the ≈N!2N choices. 3 1 7 4 Variable Length Frame
Inner Bound Properties: • Bound contains a huge number of policies. • Touches true capacity boundary as N ∞. • Even a good bound for N=2: • Can obtain efficient algorithms for optimizing over this region! • Let’s see how…
New Lyapunov Drift Analysis Technique: 3 1 7 4 Variable Length Frame t[k] t[k]+T[k] • Lyapunov Function: L(t) = ∑ Qi(t)2 • T-Slot Drift for frame k: Δ[k] = L(t[k] + T[k]) – L(t[k]) • New Drift-Plus-Penalty Ratio Method on each frame: E{ Δ[k] + V x Penalty[k] | Q(t[k]) } Minimize: E{ T[k] | Q(t[k]) }
New Lyapunov Drift Analysis Technique: 3 1 7 4 Variable Length Frame t[k] t[k]+T[k] • Lyapunov Function: L(t) = ∑ Qi(t)2 • T-Slot Drift for frame k: Δ[k] = L(t[k] + T[k]) – L(t[k]) • New Drift-Plus-Penalty Ratio Method on each frame: E{ Δ[k] + V x Penalty[k] | Q(t[k]) } Tassiulas, Ephremides 90, 92, 93 (queue stability) Minimize: E{ T[k] | Q(t[k]) }
New Lyapunov Drift Analysis Technique: 3 1 7 4 Variable Length Frame t[k] t[k]+T[k] • Lyapunov Function: L(t) = ∑ Qi(t)2 • T-Slot Drift for frame k: Δ[k] = L(t[k] + T[k]) – L(t[k]) • New Drift-Plus-Penalty Ratio Method on each frame: E{ Δ[k] + V x Penalty[k] | Q(t[k]) } Minimize: E{ T[k] | Q(t[k]) } Neely, Modiano 2003, 2005 (queue stability + utility optimization)
New Lyapunov Drift Analysis Technique: 3 1 7 4 Variable Length Frame t[k] t[k]+T[k] • Lyapunov Function: L(t) = ∑ Qi(t)2 • T-Slot Drift for frame k: Δ[k] = L(t[k] + T[k]) – L(t[k]) • New Drift-Plus-Penalty Ratio Method on each frame: E{ Δ[k] + V x Penalty[k] | Q(t[k]) } Minimize: E{ T[k] | Q(t[k]) } Li, Neely 2010 (queue stability + utility optimization for variable frames)
Conclusions: • Multi-Armed Bandit Problem with Reward Vectors (complex MDP). • Operational Capacity Region = Convex Hull over Frame-Based Randomized Round-Robin Policies. • Stochastic Network Optimization via the Drift-Plus-Penalty Ratio method. • Quick Advertisement: New Book: • M. J. Neely, Stochastic Network Optimization with Application to Communication and Queueing Systems. Morgan & Claypool, 2010. • PDF also available from “Synthesis Lecture Series” (on digital library) • Link available on Mike Neely homepage. • Lyapunov Optimization theory (including renewal system problems) • Detailed Examples and Problem Set Questions.