Overview of New Robotics Control System for Beta Teams at Wilsonville Robotics
240 likes | 364 Vues
The new robotics control system, utilized by Beta teams at Wilsonville and Oregon City Robotics, introduces an advanced industrial controller from NI and a redesigned LabVIEW environment. This system empowers teams with less software experience to handle more complex tasks. Key features include a digital sidecar, power distribution modules, and integrated analog and pneumatic bumpers. While it offers a smaller footprint and enhanced capabilities, challenges like size, weight, cost, and availability must be addressed to ensure successful adoption across teams.

Overview of New Robotics Control System for Beta Teams at Wilsonville Robotics
E N D
Presentation Transcript
Overview of New System Beta Team from Wilsonville 1425 Wilsonville Robotics – Code Xero 2550 Oregon City Robotics
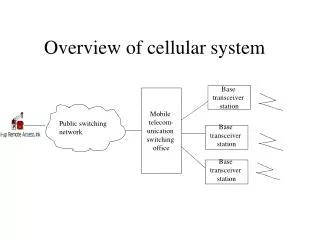
At a glance • Industrial Controller from NI • Everything else new except Spikes
Advantages of New System • Labview environment • Teams with less SW experience can do more complex stuff than before • Support of NI and WindRiver for development and debug environments • Smaller footprint of power distribution modules • Several nifty new features
Disadvantages of New System • Controller Size/Weight/Form Factor • Twice the footprint, weighs over 2 lbs. • Modules with bumpers not compact • Will need to be protected from contact • Cost and availability • Equipping teams for parallel development will be a challenge • New Jaguar speed controllers • Larger footprint • New control system less tolerant of low robot battery voltage
Elements of the New System • Digital Sidecar • Power Distribution Board • Analog Bumper • Pneumatics Bumper • Driver Station • Wireless Interface (802.11) • Camera • Jaguar Speed Controller
Digital Sidecar • Connects to cRIO9403 with 32-pin cable • Provides • 10 PWM outputs (Victors, Jaguars, RC servos) • Can be configured on a per-output basis to drive 6V RC servos with jumpers • 14 GPIO with +5V on each • 16 Relay Outputs • I2C headers (Standard and NXT-compatible) • 12V supply, • Provides +5V output • Reverse polarity protected
Power Distribution Module • Custom Design by FIRST • 6-15 VDC, reverse polarity protected • Metric shanks, not SAE! • 8 outputs for 40A breakers • 12 outputs for 30A/20A breakers • 24VDC output for CompactRIO • 12V output for gaming adapter • 5V output for camera or other devices • LED’s for power supplies and blown fuses
Analog Bumper • 5V/3A for powering sensors • 8 Analog Inputs, 3 pin PWM cable config. • Mounts to NI 9201 Analog Module • Configurable to make one input capable of measuring battery voltage • LED to indicate bumper has power • Power to bumper requires wiring to power distribution module
Pneumatics Bumper • Reverse-battery protection • 8 Outputs to directly drive solenoids • Mounts to NI 9472 Digital Module • Means you don’t have to use Spikes to drive solenoids anymore • Save weight, space and money • LED to indicate bumper has power • Power to bumper requires wiring to power distribution module
Driver Station • 4 USB connections for joysticks of all kinds • 2 Ethernet jacks • Network connection (competition) • Switched connection for laptop • 4 Analog Inputs on 3-pin connectors • 8 Digital Inputs on 3-pin connectors • 8 Digital Outputs on 3-pin connectors • Wall wart for power (always required) • Upgradeable via USB stick
Wireless Interface – 802.11 • Radio on the robot is 802.11 gaming adapter • Wireless bridge: cRIO and Access Point • You will assign fixed IP addresses to your components, using team number • Use an AP during build season, connect to the wired network at the competition • Field will use 5 GHz band (802.11 a) to avoid overlap and interference
Ethernet Camera – Axis 206 • Streaming color video • Connects to RJ45 on cRIO • Plays video on laptop • Axis application • Labview video viewer
Jaguar Motor Controller • Limit Switch Inputs • Controller Area Network Bus • It’s bigger, but ….. • See Chief Delphi for more details and blogs
Interesting Things to Know But, don’t worry … .documentation is coming
Working the Wago • Use the Wago tool provided • Take care to insert directly at a fixed angle, pressing straight in • Do not pry. The goal is to open the spring by pressing in the screwdriver, not by prying Yes ! NO ! End View
Living in Harmony with 802.11 • A couple of simple configs on the Linksys AP will save you trouble • Ways to set up your development network so it runs your robot, and gives you access to network drives/printers • Stay away from 802.11n settings on AP • Learn how to set static IP addresses on your PC