Optimization to solve Inverted Pendulum problem
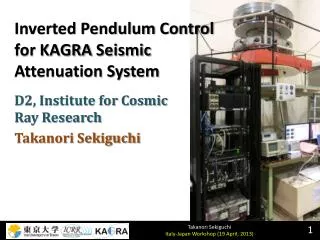
Optimization to solve Inverted Pendulum problem. Zhili Chen. Problem Description. Given a initial Phi>0, Apply F on cart to regain balance (Phi=0). Problem Description. Performance Evaluation Minimum time period before balance, or Minimum cart movement, or Minimum energy used by force F.

Optimization to solve Inverted Pendulum problem
E N D
Presentation Transcript
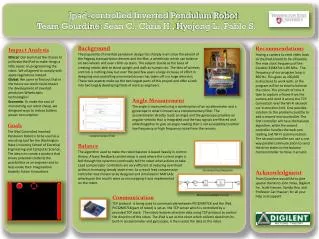
Problem Description • Given a initial Phi>0, Apply F on cart to regain balance (Phi=0)
Problem Description • Performance Evaluation • Minimum time period before balance, or • Minimum cart movement, or • Minimum energy used by force F
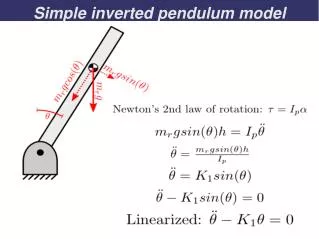
Physical Equations Approximate and linearize =>
Solution 1 • Optimization-Based Interactive Motion Synthesis, SUMIT JAIN, YUTING YE, and C. KAREN LIU • Use current joint configuration, get configuration of next time step.
Solution 1 • Variables • Constraints • Where • Upper and lower bounds for
Solution 1 • Objective function • Want to decrease angle using smaller car movement • Initial value • Solution of the last time step is the initial value for current time step • Use ‘fmincon’ in MATLAB • Algorithm: active set (small scale)
Solution 1 • Result • Not good • Constraints are too lax or too strict? • Step by step optimization not suitable for this problem? (optimal solution of whole process does not imply optimal solution for every time step)
Solution 2 • Spacetime Constraints, Andrew Witkin,MichaelKass • Regard the process as a whole (from initial state to balance state)
Solution 2 • Optimization variable • n = T/h (h, length of timestep) • Constraints • => Ay=b • Upper and lower bounds for
Solution 2 • Objective function • Initial value (or boundary condition) • Use ‘fmincon’ in MATLAB • Algorithm: interior-point (large scale, sparse matrix, both inequality and equality)
Solution 2 • Result • Close to result from classic control theory