Download
1 / 15
150 likes | 165 Vues
This paper presents an initial approach to detecting GPS strain transients using a filter-window-eigenvalue method. We discuss the eigenvalue-only method, the difficulties encountered, an improved approach with noise attenuation, and the eigenvalue criterion for detection. The method involves windowing the data and setting a detection threshold based on the eigenvalues. The paper also explores the relationship with least squares and provides examples using datasets 3f and 3g.

E N D
GPS Strain Transient Detection with a Filter-Window-Eigenvalue Method • Initial approach • Eigenvalue-only method • Difficulties • Improved approach • Noise attenuation • Eigenvalue criterion • Windowing • Detection threshold Brad Lipovsky (UC Riverside, now at Stanford University) Gareth Funning (UC Riverside)
Eigenvalue-only approach D(x,t) Data matrix with column vector time series X(x) Spatial patterns of deformation (collections of vectors) T(t) Temporal patterns of deformation (a collection of time series) λ Relative weighting of patterns (eigenvalues)
Filter-Window-Eigenvalue Method Noise attenuation Eigenvalue Criterion Windowing
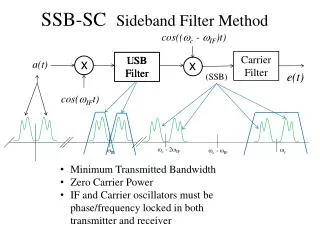
Noise attenuation (1/3) Two observed types of GPS noise: • Residual, seasonally-correlated noise [e.g. Langbein 2008, Lipovsky 2011] • High-frequency “chatter” • Band-stop filter (2-pole IIR) • Band stops at 0.5 and 2.0 cycles/year • Low-pass filter (FIR) • Time constant ~50-125 days
Eigenvalue Criterion (2/3) This criterion implies that episodes of transient deformation show a characteristic type of simplicity (space-time separability). ~ 1 Method: use this criterion as an indicator of transient deformation
Windowing (3/3) Goal: Find subsets of the data that maximize λ1/λ2 The latitude-longitude window and time period of transient deformation, we define to be a transient centroid.