Download
1 / 1
10 likes | 165 Vues
SWOrD. Algorithms Improvements expected for the ROSA-ROSSA Extended Version (available in May 2010). *. More advanced Orbit Determination algorithms and Orbit Prediction. **. Full Spectrum Inversion. A.

E N D
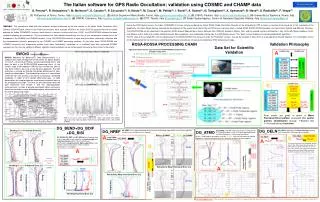
SWOrD Algorithms Improvements expected for the ROSA-ROSSA Extended Version (available in May 2010) * More advanced Orbit Determination algorithms and Orbit Prediction ** Full Spectrum Inversion A Stratospheric optimization exploiting Local Climatologies and ECMWF stratospheric data instead of Global Climatology *** **** In RED the chosen IGS stations, in BLUE the backup stations Tomographic approach instead of Onion Peeling * RSA vs ECMWF CDAAC vs ECMWF From ROSA-ROSSA chain ** A Impact Height [km] B Tangent Point Height [km] *** Original COSMIC refractivities profiles Refractivity Mean Fractional Error [%] A With SWOrD Without SWOrD **** Mean – std dev Mean Mean + std dev TP Height [km] Bending Fractional Error [%] The Italian software for GPS Radio Occultation: validation using COSMIC and CHAMP data G. Perona(2), R. Notarpietro(1), M. Molinaro(2), S. Casotto(3), P. Zoccarato(3), A. Nardo(3), M. Cucca(1), M. Petitta(4), I. Bordi(4), A. Sutera(4), N. Tartaglione(5), A. Speranza(5), B. Nava(6), S. Radicella(6), F. Vespe(7) (1) Politecnico di Torino, Torino, Italy (riccardo.notarpietro@polito.it), (2) Istituto Superiore Mario Boella, Torino, Italy (giovanni.perona@polito.it), (3) CISAS, Padova, Italy (stefano.casotto@unipd.it), (4) Università La Sapienza, Roma, Italy (alfonso.sutera@roma1.infn.it), (5) CINFAI, Camerino, Italy (nazario.tartaglione@unicam.it), (6) ICTP, Trieste, Italy (bnava@ictp.it), (7) Italian Space Agency, Centro di Geodesia Spaziale, Matera, Italy (francesco.vespe@asi.it) European Geosciences Union General Assembly 2009 Vienna, Austria, 19 – 24 April 2009 During the 2009 Spring season, the Indian OCEANSAT-2 mission carrying on-board the Italian ROSA (Radio Occultation Sounder of the Atmosphere) GPS receiver is expected to be launched. In the framework of this opportunity, the Italian Space Agency founded the development of the overall (and state-of-the-art) RO processing chain which is called ROSA-ROSSA (ROSA-Research and Operational Satellite and Software Activities). The ROSA-ROSSA will be integrated in the operative ROSA Ground Segment by an Italian Software farm (INNOVA, located in Matera, Italy), and this ground segment will operate in Italy (at the ASI Space Geodesy Center, near Matera) and in India (at the Indian National Remote Sensing Agency, near Hyderabad) starting from the 2009 Spring season. This “Base” version implements well consolidated RO algorithms. The RO state-of-the-art algorithms will be implemented in the ROSA-ROSSA final release (namely the “Extended” version), that will be available in May, 2010 on a pre-operative Ground Segment. This “Extended” version will be implemented for the first time on a distributed hardware and software infrastructure exploiting a GRID computing strategy. Abstract:This contribution deals with the validation analysis performed on the first release of the Italian Radio Occultation (RO) Software ROSA-ROSSA. Since no real ROSA observations were available (ROSA is the Italian GPS RO payload that will be carried onboard the Indian OCEANSAT-2 mission, which launch is foreseen for the end of June, 2009) , the ROSA-ROSSA software has been validated following two procedures. The input dataset has been defined considering one day of real observations carried out in the framework of the COSMIC and CHAMP missions. Firstly, ROSA-ROSSA products at each level have been statistically compared with the correspondent products generated by the COSMIC and CHAMP processing software. On the other hand, ROSA-ROSSA and COSMIC refractivity and temperature profiles have been “individually” compared on a statistical base with collocated ECMWF reanalysis (in this case the validity of different algorithm implementations can be tested against something more similar to the reality). ROSA-ROSSA PROCESSING CHAIN Validation Philosophy Data Set for Scientific Validation SWOrD (Software for Oceansat-2 Orbit Determination) is a software tool under development at the Centre for Space Studies (C.I.S.A.S – University of Padua), aimed at generating level 1 and level 2a data in the ROSA–ROSSA processing chain. At the current stage of development SWOrD can estimate the orbit of Low Earth Orbiters, by using a fully dynamic approach. The orbit estimation is carried out through the double differenced L3 iono-free phase observables. The computation relies on a sub-network of 40 IGS sites (20 actually used and 20 as backups), distributed worldwide, in order to form double differenced data. L3 code observables are used to generate a preliminary kinematic orbit, at the pre-processing stage. The level 2a data generator takes the orbit information and merges it with the radio-occultation measurements, in order to provide occultation tables and excess phase files based on single-differenced phase measurements for the further processing stages. Final results are given in terms of Mean Fractional Error profiles, evaluated after outlier profiles identification through T-Student test ( 3 threshold) and rejection RMS of L1 and L2 excess phase (top figure), ranges and range rates (bottom figure) for every radio occultation event of day 22/01/2004 for the LEO satellite CHAMP. DG_BEND+DG_BDIF+DG_BISI DG_DELN DG_NREF Bending Mean Fractional Error [%] DG_DELN implements the Onion Peeling algorithm for the extraction of Electron density profiles. DG_NREF is the software package for the inversion of bending angle profiles into refractivity profiles (using the classical Abel inverse integral) DG_ATMO is the SW module for the for the extraction of P, T and WV profiles. It uses a 1D-VAR approach based on NCEP Reanalysis - Daily Long Term Mean). DG_ATMO A B All the 1200 couples derived by using the COSMIC Data set have been considered together in showing the following results. No outlier rejection has been applied. DG_BEND, DG_BDIF and DG_BISI define the processing chain responsible for the extraction of bending angle and impact parameter profiles from carrier phases observations (using Geometric Optics algorithms), their compensation for Ionospheric effects and their optimization in stratosphere. From ROSA-ROSSA chain A Rising Setting The distance between the Ionosonde location and the DG_DELN derived peak location has been chosen to be less than [2.5° x 2.5°] in [lat. x lon.] and 15 min in time. The Ionograms, obtained from the Lowell DIDB, have been manually scaled by K. Alazo of IGA, Cuba. B Impact Height [km] RISING Bending Std Dev Fractional Error [%] Refractivity Mean Fractional Error [%] Setting Rising SETTING Impact Height [km] B Acknowledgements: The authors are grateful to ASI for supporting the development of the ROSA Ground Segment within the contract I/006/07/0.