Adaptive IIR Filter: Theory, Algorithms, and Applications
Explore the concept of adaptive IIR filters, including least-mean-square algorithm, output and equation error methods, simulations, and applications in signal processing. Learn about the differences between IIR and FIR filters and their respective advantages and challenges.


Adaptive IIR Filter: Theory, Algorithms, and Applications
E N D
Presentation Transcript
Adaptive IIR Filter Terry Lee EE 491D May 13, 2005
Outline • Linear Filters – FIR & IIR • Least-mean-square algorithm • Adaptive IIR using: • Output Error Method • Equation Error Method • Simulations • Applications
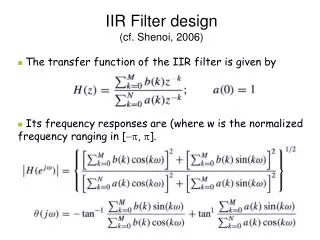
Linear Filters IIR Filter ~ Autoregressive Moving-Average (ARMA) present and past inputs and past outputs FIR Filter ~ Moving-Average (MA) present and past inputs
IIR Filter Difference equation of ARMA model y(n) = ∑ ai(n)u(n-i) + ∑ bi(n)y(n-i) M N i=0 i=1 Forward filter Backwards filter
Least-Mean-Square (LMS) Algorithm • Linear adaptive filtering algorithm • Differs from steepest descent • Widely used for its simplicity • Consists of: 1) A filtering process (mainly FIR model) 2) An adaptive process
Least-Mean-Square (LMS) Algorithm Following the steepest descent algorithm, with an unknown environment: • Tap-input vector: u(n) • Tap-weight vector: w(n) • Estimation error: e(n) • Cost function: J(n)=[|e(n)|] • Gradient vector: J(n) • Update tap-weight vector: ŵ(n+1) ∆
Summary of (LMS) Algorithm Parameters: M = # of taps (length of filter) μ = step-size parameter Filter output is: y(n) = ŵH(n)u(n) Error signal is: e(n) = d(n) – y(n) Tap-weight vector: ŵ(n+1) = ŵ(n) + μu(n)e*(n)
Important Factors of an Algorithm • Rate of convergence • Misadjustment • Tracking • Robustness • Computational Requirements • Structure
Adaptive IIR Filter Motivation: To build the adaptive process around a linear IIR filter with fewer number of adjustable coefficients than an FIR filter to achieve a desired response.
Adaptive IIR Filter Two approaches: • Output error method • Equation error method
y replaced by d Equation Error Method y(n) = ∑ ai(n)u(n-i) + ∑ bi(n)d(n-i) M N i=0 i=1
Output Error and Equation Error IIR has problems! • possible instability • slow convergence • local minima
Simulation LMS adaptive FIR filter for equalization
Simulation LMS adaptive FIR filter for equalization
Simulation LMS adaptive FIR filter for equalization
Applications of IIR • acoustic echo cancellation • linear prediction • adaptive notch filtering • adaptive differential pulse code modulation • adaptive array processing • * channel equalization *
Adaptive Equalizer • Telephone channels • Fading radio channels • Bandwidth-limited channels • Removes ISI • Recovers information
Decision-Feedback Equalizer (Most popular adaptive IIR equalizer)
IIR vs. FIR • IIR has slower convergence rate • IIR is UNSTABLE • IIR introduces more complex structures TRADEOFF: • IIR uses less coefficients than FIR *computationally cheaper* *able to implement more complex filters*
Summary • Linear Filters – FIR & IIR • Least-mean-square algorithm • Adaptive IIR using: • Output Error Method • Equation Error Method • Simulations • Applications