Download
1 / 16
160 likes | 204 Vues
This informative article delves into the geodetic perspective on the ionosphere, focusing on how GPS data aids in precise positioning calculations. It covers topics such as double-difference phase equations, integer search techniques, dealing with ionospheric delays, and optimizing GPS positioning accuracy. By understanding and mitigating delays caused by the ionosphere, geodesists can enhance the efficiency and accuracy of GPS-based measurements.

E N D
A Geodesist’s View of the Ionosphere Gerald L. Mader National Geodetic Survey Silver Spring, MD
Background National Spatial Reference System (NSRS) ~1400 Monumented FBN Stations 400 + Continuously Operating Reference Stations (CORS) Practically totally dependent on Global Positioning System (GPS) GPS Range & Phase data Static & Kinematic Positioning modes
Positions From GPS Phase Equations 1 + N1 = (f 1 / c) D + I 1 Simplified Double Difference Phase Equations 2 + N2 = (f 2 / c) D + (f 1 / f 2) I 1 c f1 f2 1 + N1 2 + N2 f12 - f22 f2 f1 D = [( xj – xi)2 + …]1/2 = Kinematic or bias fixed form has double differenced integers known - solve only for x,y,z. xj - xi Dij 0.484 ( 1 + N1 ) - 0.377 ( 2 + N2 ) xi + … = Float or static solution has double differenced integers unknown and estimated as constant along with x,y,z. xj - xi Dij 0.484 1 - 0.377 2 xi + … + Qij =
Positioning • Good static solutions take time • Bias precision proportional to satellite arc length • Bias-fixed positions • Each epoch is a separate new position (kinematic) • Average separate positions over short time (rapid-static) • Find a way to quickly determine the integers • Integer search techniques
Integer Search Techniques • Estimate N1 and N2 integers and their range for each satellite • Filter these integer pairs to eliminate unrealistic values • Evaluate the combinations of the integer pairs
Integer Search Procedure Find integer & range for each sv Form integer suites from all possible integer pair permutations Filter by ion delay test each integer pair Least squares solution for each integer suite repeat over time eliminate bad suites Select integer suite by best rms and contrast to next best
minimum acceptable rms contrast Highlight of ambiguity set rms’s to illustrate contrast and minimum acceptable rms
Developing the Ionosphere Filter 1 + N1 = (f 1 / c) D + I 1 Simplified Double Difference Phase Equations 2 + N2 = (f 2 / c) D + (f 1 / f 2) I 1 f 1f 221 + N1 2 + N2 f 22 -f 12 f 1 f 2 I 1 = I 1 = ( 1.551 -1.982 ) + ( 1.55 N1 -1.98N2 ) This term is fixed for each satellites double difference phase observations Each pair of candidate integers predicts a different ionosphere delay for these observations
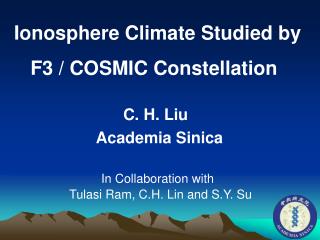
Change in L1 Ionosphere Delay with N1,N2 Integer Pairs N1 / N2 The closest ionosphere delays are 0.2 L1 cycles apart (blue circles). However, these positions are usually eliminated during least squares test for acceptable rms values. Red circles show possible ambiguities, implying ion delay resolution of < 0.4 cy is desired.
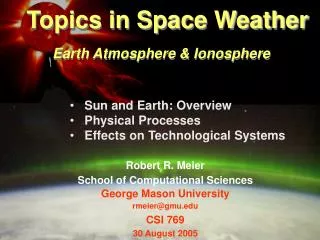
Example 1 airplane flies straight: d=250 km airplane flies over base station: d=0
Example 2 187 km baseline
Summary • Ionosphere delay estimates are essential for more efficient GPS positioning • CORS provides dense network of phase data • What we need: • Given x,y,z,t line-of-sight delays • Good to 0.2-0.3 cy & time scale of minutes • Near real time • Range data won’t do it
What Might We Do? • Continuously operate model on CORS data • Adapt kinematic software to available ionosphere modeling • Relax OPUS requirements to permit rapid-static processing (~ 10-20 min.) • Allow OPUS to accept L1 GPS receiver data
Conclusions • The right ionosphere models can have a significant impact on geodesy • Greater efficiency • Remove distance dependence from base network • Allow less expensive receivers • Needed now and foreseeable future (pending L5, GPS3, Galileo)