Guide to DC Permanent Magnet Motors for Winch Design
570 likes | 613 Vues
This tutorial by David Giandomenico from Lynbrook High School Robotics Team #846 provides valuable insights on selecting and optimizing DC permanent magnet motors for winch applications. The guide covers motor specifications, performance calculations, and gear selection strategies to ensure efficient and reliable winch design.

Guide to DC Permanent Magnet Motors for Winch Design
E N D
Presentation Transcript
DC Permanent Magnet MotorsA tutorial winch design David Giandomenico Lynbrook High School Robotics FIRST Team #846 DGiandomenico@lynbrookrobotics.com (408)343-1183 David Giandomenico - FIRST #846
2010 Breakaway David Giandomenico - FIRST #846
2004 FIRST Frenzy: Raising the Bar David Giandomenico - FIRST #846
What We Want. • Weight: • Distance: • Time (speed): 130 lbs 1.5 feet 5 seconds David Giandomenico - FIRST #846
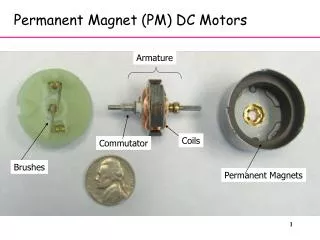
What We’ve Got:Some of the Motors supplied in FIRST Robotics Kit David Giandomenico - FIRST #846
“CIM” Motor Specification David Giandomenico - FIRST #846
“CIM” Motor Performance David Giandomenico - FIRST #846
No Load Speed No Load Current Stall Torque “CIM” Motor Performance Stall Current David Giandomenico - FIRST #846
FUSE Limits on Motor Power Stall Current 40 AFuse Limit ~100 Oz-In David Giandomenico - FIRST #846
Kit Motors – Which One? All Data at 12VDC David Giandomenico - FIRST #846
Motors - Sorted by Power David Giandomenico - FIRST #846
Choosing a motor based onMaximum Output Power • Calculate Energy required to lift load. • Given the Time & Energy, calculate the mechanical Power required. • Boost Power requirement to adjust for Friction in the gearbox and elsewhere. • Choose a motor whose Maximum Output Power is at least 4/3 * (safety margin) David Giandomenico - FIRST #846
Motor Selection David Giandomenico - FIRST #846
www.johnsonmotor.com David Giandomenico - FIRST #846
2011 Fisher Price Motor All Data at 12VDC Convert oz-in to N-m: 1 oz-in = 0.007061552 N-m David Giandomenico - FIRST #846
Fisher Price Motor 2010 V=12VDC From FIRST_MOTOR_CALC.xls David Giandomenico - FIRST #846
What is Torque? But isn’t that “Work” David Giandomenico - FIRST #846
Units of Work vs. Torque • Work (Energy) • Torque ft-lbf, Joules (=N-m), KWh, … pound feet(lbf-ft), ft-lbf, oz-in, N-m … David Giandomenico - FIRST #846
Work in a Rotating System Force T r David Giandomenico - FIRST #846
Power, Torque & Speed David Giandomenico - FIRST #846
Fisher Price Motor 2011 V=12VDC (speed,torque) From FIRST_MOTOR_CALC.xls David Giandomenico - FIRST #846
Fisher Price Motor 2011 V=12VDC From FIRST_MOTOR_CALC.xls David Giandomenico - FIRST #846
V=Rated Voltage From FIRST_MOTOR_CALC.xls David Giandomenico - FIRST #846
Speed & Torque in a DC PM Motor • Let ={0,100%} such that David Giandomenico - FIRST #846
V=Rated Voltage From FIRST_MOTOR_CALC.xls David Giandomenico - FIRST #846
Speed & Torque in a DC PM Motor Or, w/o calculus, Max occurs between two roots of quadratic, at =0, =1 that is, =½ or equivalently, when=50% Using calculus, Max Power occurs when: David Giandomenico - FIRST #846
V=Rated Voltage 75% From FIRST_MOTOR_CALC.xls David Giandomenico - FIRST #846
Max Power in a DC PM Motor David Giandomenico - FIRST #846
2011 Fisher Price Motor All Data at 12VDC David Giandomenico - FIRST #846
Fisher Price Motor 2011 V=12VDC From FIRST_MOTOR_CALC.xls David Giandomenico - FIRST #846
Fisher Price Motor 2011 V=12VDC Current rises linearly with Torque From FIRST_MOTOR_CALC.xls David Giandomenico - FIRST #846
Motor Current Where α is the % No Load speed David Giandomenico - FIRST #846
Electrical Power David Giandomenico - FIRST #846
Fisher Price Motor 2011 V=12VDC Input power is Current X Voltage From FIRST_MOTOR_CALC.xls David Giandomenico - FIRST #846
Fisher Price Motor 2010 V=12VDC From FIRST_MOTOR_CALC.xls David Giandomenico - FIRST #846
Fisher Price Motor 2010 V=12VDC From FIRST_MOTOR_CALC.xls David Giandomenico - FIRST #846
Fisher Price Motor 2011 V=12VDC From FIRST_MOTOR_CALC.xls David Giandomenico - FIRST #846
Fisher Price Motor 2011 V=12VDC From FIRST_MOTOR_CALC.xls David Giandomenico - FIRST #846
DC PM Motor Summary • Max Power occurs at 50% No-Load Speed • Best efficiency typically occurs at about 80%-93% No-Load Speed • Most DC PM Motors will overheat if operated continuously at speeds less than 50% when full voltage is applied. David Giandomenico - FIRST #846
Gear Loss Estimate Suppose we have n=3 inline sets of gears, each with a 4:1reduction. What is the total efficiency if each gear set loses 4%? T = in or T = (100%-4%)3= 88.5% David Giandomenico - FIRST #846
When x is small, David Giandomenico - FIRST #846
Estimate of how many gear sets. • Suppose we want a gear reduction of 1200. How many gear sets with a reduction of 3 do we need? • Solve 3N = 1200 • N = ln(1200)/ln(3) = 6.45 David Giandomenico - FIRST #846
Gear loss estimate We need 6.45 3:1 gear sets. Assuming a loss of 4% for each gear set, T = in or T = (1-4%)6.45= 76.8% David Giandomenico - FIRST #846
Putting it all together • Choose a winch drum size • Calculate the drum rpm • Choose the % motor operating speed • Calculate the required gear reduction to operate at that speed • Verify the output winch line force meets or exceeds the original specification, including gear box losses David Giandomenico - FIRST #846
Winch Design Specification David Giandomenico - FIRST #846
Winch Drum Speed David Giandomenico - FIRST #846
Determine the Gear Reduction David Giandomenico - FIRST #846
Gear Loss Estimate David Giandomenico - FIRST #846
Verify We Meet or Exceed Pull Strength Specification David Giandomenico - FIRST #846