Download
1 / 23
230 likes | 370 Vues
Design of UAV Systems. c 2002 LM Corporation . Integrated performance model. Lesson objective - to integrate the individual air vehicle parametric relationships into an overall …. Integrated performance model and show how it can be applied to estimates of ... Breguet range and endurance

E N D
Design of UAV Systems c 2002 LM Corporation Integrated performance model • Lesson objective - to integrate the individual air vehicle parametric relationships into an overall …. • Integrated performance model • and show how it can be applied to estimates of ... • Breguet range and endurance • and typical design problems Expectations - You will understand how to apply parametric relationships to an overall air vehicle 22-1
Design of UAV Systems c 2002 LM Corporation Integrated performance model Design objectives • During pre-concept design, the objective is not to come up with the best design but to identify the base range of design options (including their size, weight, cost, risk and schedule) and to define achievable requirements • If we do not employ a reasonably accurate and consistent comparison process, invalid selections could be made on the basis of inconsistent, hasty or immature assessments • During conceptual design, the objective is similar but focuses on finding the best design and design features • This also requires use of an accurate and consistent comparison process to ensure viable design decisions • We now have the data and component methodologies to do integrated pre-concept and conceptual design comparisons for subsonic IC, TBProp and TBFan UAVs • Including simple geometry models that integrate key configuration design features with the performance models to ensure physical constraints are not violated 22-2
Design of UAV Systems c 2002 LM Corporation Integrated performance model Concept exploration • Exploring a design space is an important part of the concept evaluation process • - Typically, a wide range of concepts are drawn, analyzed and compared and a few are selected for more study • - Configuration designers sit in the middle of this process and are skilled at laying out configuration study matrices to explore the most important design and operational issues • - They typically use specialized design and analysis tools that minimize the hand labor required to explore these options • - Students, however, seldom have such tools and configuration exploration becomes a time consuming process of draw-analyze-discover problems-redraw-reanalyze and very few options are really explored • We can bypass this laborious process by applying spreadsheet analysis tools to concept exploration 22-3
Design of UAV Systems c 2002 LM Corporation Integrated performance model Sizing vs. exploration • The term “sizing” is typically used to describe the process one goes through to calculate air vehicle size to meet design requirements • - This is basically what an integrated spreadsheet model will do • - We input requirements and it outputs size and weight • - But because it rigorously maintains proper geometric relationships as it adjusts to changing requirements, it can also be used to explore concepts • - Most sizing programs don’t do this, they are based on geometry inputs not internal geometry models 22-4
Design of UAV Systems c 2002 LM Corporation Integrated performance model Comparison approach • Configuration comparisons need to be based on accurate and consistent data • - We have data of both types • - Our spreadsheet models are rigorously consistent but of unknown accuracy • - Our parametric data is accurate by definition but of questionable consistency • - A combination of the two will give us what we need to compare the candidate configurations • We will start by calculating performance against a consistent set of requirements • - Range, takeoff distance, rate of climb at altitude, etc. • Then we compare our results to parametrics • - There will always be differences or issues to resolve • Finally we will go back to our models to assess the impact of the differences or issues on the concepts 22-6
Design of UAV Systems c 2002 LM Corporation Integrated performance model Baseline definition • The design process starts with definition of a “starting baseline” that meets mission requirements • The baseline objective is to define a solution that works so that it can serve as a basis for comparison • Typically, starting baselines are conventional in configuration and employ state-of-the-art technology • Later we can study more advanced approaches and compare the relative benefits and risks • The TBProp starting baseline selected in Lesson 15 generally meets these requirements • There is little about it that shouldn’t work • The speed, required endurance and technology content are well within TBProp state-of-the-art • One exception is the speed required at or below 10Kft • This could be a challenge for long endurance aircraft 22-5
Design of UAV Systems c 2002 LM Corporation Integrated performance model Modeling approach • The configuration is described in both absolute and relative terms • - Payload weight, volume, number of engines and fuselage diameter are described in absolute terms (forebody, aftbody and length are relative to diameter) • - Aero and propulsion parameters (Cfe, e, Fsp0, f/a, etc.) are defined as absolute values • - Everything else (wing, tail area, engine size, nacelle size, etc.) is defined relative to a design, weight or performance parameter (AR, W0/Sref, BHp0/W0, Sht/Sref, BHp0/Weng, Waf/Sref, UWW, etc.) • Missions are described in absolute terms (taxi and takeoff times, operating radius, landing reserves, etc.) • One is the “design” mission, the other a “fall out” • The UAV is sized or “scaled” (sc) to the design mission • The other mission is flown with a “fixed” (fx) air vehicle 22-7
Design of UAV Systems c 2002 LM Corporation Integrated performance model Performance calculations • Performance calculations are based on a generic, unrefueled loiter mission which assumes…. • Equal cruise out plus climb/cruise back distances, constant cruise speeds (Vcr) and loiter altitudes (Hlo) assumed ; no outbound cruise input as 0 (minimum cruise back is set equal to climb dist.) • Equal length ingress/egress penetration distances, Vpen and Hpen assumed; no ingress/egress input as 0 • Combat assumed to follow ingress, combat defined by minutes at max thrust; no combat input as 0 • Payload drop follows combat; no payload drop = 0 • Fuel remaining after cruise, ingress/egress, combat, landing loiter defines operational loiter time available • The model also calculates max range and endurance • Calculated at initial cruise/pre-landing loiter weights • Assumes mid-mission payload drop 22-8
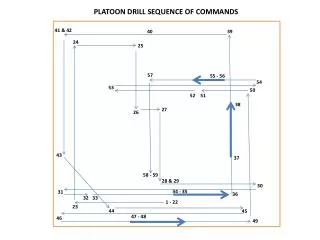
Design of UAV Systems 12 13 14 17 16 15 4 9 5 6 7 8 10 11 18 1 0 19 3 2 Border - Penetrate/Loiter Border - Loiter/Penetrate Border - Standoff Terminology Notation Standoff - Distance from loiter or combat to border (+/-) Standback - Distance from refuel to border Ingress - To target at penetration speed Egress - From target at penetration speed Range (Rge) = 2*Radius(R) 0 Engine start 1 Start taxi 2 Start takeoff 3 Initial climb 4 Initial cruise 5 Start pre-strike refuel 6 End pre-strike refuel Start cruise 7 Start loiter 8 End loiter, start cruise 9 Start ingress 10 Combat 11 Weapon release 12 Turn 13 Start egress 14 End egress, start cruise 15 Start post-strike refuel 16 End post-strike refuel 17 End cruise 18 Start hold 19 End hold c 2002 LM Corporation Integrated performance model Mission definition 22-9
Design of UAV Systems c 2002 LM Corporation Integrated performance model Spreadsheet approach • Three (3) spreadsheets (IC, TBP and TBF) are available, each of which has similar modules that calculate data needed to assess performance including: • A bottoms-up weight model (Worksheet name = Wt-iter) • A geometry model that adjusts its configuration for each weight iteration (Name = Geom-iter) • It also calculates volume and Swet based aero & weights • 2 atmosphere models (Names = Atmos-sc and Atmos-fx) • Each calculates atmospheric properties for one mission • 2 propulsion models (Names = IC/TBP/TBF-sc and -fx) • Each calculates engine performance for one mission • A mission performance module (Name = Mperf) • There is also an input worksheet for most (but not all) independent variables • Most variables are input via worksheet Overall, but some are input via worksheet Mperf • - Mperf variables are used to converge the overall solution 22-10
Design of UAV Systems c 2002 LM Corporation Integrated performance model Model versions • Previous versions of the spreadsheet model held fuselage size constant • - Everything else (wing, tails, engine size,etc) varied as the configuration adjusted to individual input values • Airframe weights were calculated two ways • - The bottoms up weight worksheet calculated overall weights using an input value of Waf/Sref • - The geometry model calculated another value of Waf/Sref from wetted areas and input unit weights • Input and output values of Waf/Sref had to be hand iterated to convergence (easy but time consuming) • - Then volume required vs. available was hand interated • A new version of the spreadsheet internally iterates weight, geometry and volume but it is developmental • You will need to check the numbers carefully • The description that follows is for the latest version 22-11
Design of UAV Systems c 2002 LM Corporation Integrated performance model Starting solution • A first pass calculation is made to get started • Input values of FF, T0/W0 or Bhp0/W0, etc and input (default) gross weight (W0) and fuselage diameter (Df) are used by the bottoms-up weight worksheet (Wt-sc) to make one weight iteration • Outputs include W0, Wf, Weng, Wlg and Wsys • Sref is calculated using an input value of W0/Sref • Component weights and input payload, fuel and subsystem densities are used to calculate fuselage volume required • The outputs are passed to the geometry worksheet (Geom-sc) where wetted areas and fuselage diameter are calculated and then passed back to Wt-sc • This process continues until weight and volume converge • The converged wetted areas are then passed to the mission performance spreadsheet (Mperf) and used to generate aerodynamic coefficients 22-12
Design of UAV Systems c 2002 LM Corporation Integrated performance model Starting solution – cont’d • Converged weights are also used by Mperf to calculate an engine scale factor (ESF) or thrust multiplier • The propulsion worksheets generate thrust and fuel flow for a fixed size engine • ESF is defined as Shp0 or T0 for the scaled vehicle ÷ the default engine model (Shp0scale or T0scale) or • ESF = ((Shp0/W0)*W0/Neng)/Shp0scale • - We scale the propulsion module Shp or Ta values by multiplying them by ESF. No adjustment is needed for SFC or TSFC since our proplusion model is not size dependent • Worksheet Mperf then uses all of the inputs to do a complete mission analysis by segment from engine start through landing • Results are shown in column B of worksheet Mperf • And they may be totally inadequate! 22-13
Design of UAV Systems c 2002 LM Corporation Integrated performance model Performance convergence • Inadequate performance shows up in many forms, e.g. • - Mission range may be short • - Climb rate may be inadequate (even negative) • - Cl may be too high (exceeding stall margins) • Worksheet Mperf requires that you to make new inputs to correct these deficiencies • - For example, increase fuel fraction (FF) to increase range, increase T0/W0 to improve climb rate, change aspect ratio to reduce drag (and increase weight), increase speed/reduce altitude to reduce cruise Cl • - These values are adjusted by hand until a satisfactory solution is achieved • When convergence is achieved, it is important to ensure there are adequate (and consistent) margins such as residual ROC, T-D and stall margin • - Bhp0/W0 or T0/W0 is further iterated to achieve the desired level of consistency 22-14
Design of UAV Systems c 2002 LM Corporation Integrated performance model Secondary mission • Once the model has converged to an acceptable level of performance for the design mission…. • The solution is passed to the “fixed” model (Col C, Mperf) where mission performance is calculated with size and geometry fixed • - The primary independent variables are fuel and payload butyou can modify some of the propulsion variables to support fixed airframe size engine trades • But the primary purpose of the “fixed” model is to perform alternate mission performance assessments • Varying fuel, payload and mission parameters • During conceptual design this feature can be used to run performance for a wide range of missions for the preferred design 22-15
Design of UAV Systems Operational loiter (hrs) 6.39 6.78 Loiter equiv dist (LED) 1169 1080 Dist to clmb+cruise 200 200 Maximum cruise range (nm) 1372 1472 Climb+cruise w/HW 169 169 Max cruise range w/HW 1180 1266 Max Endurance 7.3 9.4 Df 9.00 9 Waf/Sref - geom 17.31 17.30 Waf/Sref 17.24 17.30 b 86.3 86.3 Df/b 0.104 0.104 W0 37230 37270 W0/Sref 60.00 60.06 FF 0.2030 0.203 Wfuel (total) 7558 7558 Wing fuel @ 50 ppcf 4541 4541 Wpay 10000 10000 Wpay (dropped) 0 10000 WE 19672 19712 Bhp0/W0 0.123 0.123 TOP Bhp0/W0 req'd 0.123 0.123 Bhp0 4579 4579 c 2002 LM Corporation Integrated performance model Spreadsheet example Scaled Fixed 22-16
Design of UAV Systems c 2002 LM Corporation Integrated performance model Parametric comparisons • We should always test spreadsheet results against parametric data to make sure they are reasonable, e.g. • Below are Waf/Sref examples for regional TBProp and business jet models. The TBProp looks good but the Biz Jet is conservative - an airframe weight factor of 0.85 will correct it • Similar comparisons should be done for aerodynamic and propulsion estimates Initial Final 22-17
Design of UAV Systems c 2002 LM Corporation Integrated performance model Other considerations • Wing design • -There are two primary wing options to reduce size and weight • - Increase wing loading for reduced wing area, wing weight and wetted area and higher Clcr • - Increase aspect ratio (AR) for improved LoD • - Practical limits • - Increasing W0/Sref or AR will improve cruise performance until some constraint (e.g. takeoff distance or thrust available) changes the trend • - In reality there are other constraints (e.g. wing flutter) that will limit AR and wing loading (W0/Sref) • - To ensure that we don’t stumble into one of them, we should do our optimization within known limits for the configuration type. E.g. for BizJets, typically • W0/Sref ≤ 80 and AR ≤ 14 22-18
Design of UAV Systems c 2002 LM Corporation Integrated performance model Considerations cont’d • Aerodynamics • - Our model keeps fuselage size and payload fixed • - When we optimize the overall vehicle by increasing wing loading we change fundamental area ratios • - If we increase the regional TBProp W0/Sref by 50%, Swet will drop by 25%, Swet/Sref will increase by 40% and LoDmax will decrease by 18%* • - To maintain LoD as we reduce Sref, AR has to increase • - Another constraint is lift coefficient for LoDmax**. As we increase AR in order to maintain LoD, we quickly reach a point where the Cl required gets too close to Cl-stall (≈1.2) • * LoDmax ≈ 0.5*sqrt((*e*AR/Cfe)*(Swet/Sref)) • ** Cl(LoDmax) = sqrt (*AR*e*Cfe*(Swet/Sref)) Typical stall speed margin > 1.25; HALE vehicle stall margin < 1.1 22-19
Design of UAV Systems c 2002 LM Corporation Integrated performance model Considerations cont’d • Airframe • - When we try to reduce wing area while keeping fuselage size fixed, we also change fundamental area ratios • - Recall that wing weights per unit reference area (Sref) run about two times fuselage unit weights per unit Swet • - As we reduce wing size relative to the fuselage, therefore, • overall airframe unit weight increases. For example …. • - If we increase baseline W0/Sref by 50%, Waf/Sref should increase about 30% • - You can see this effect in the parametric weight data 22-20
Design of UAV Systems c 2002 LM Corporation Integrated performance model Technology considerations • We can also use our spreadsheet methods to evaluate technology impacts, e.g. using composites to reduce airframe weight (which cost more) to see if we get payback in terms of reduced overall empty weight • - Example 25% airframe weight reduction at 35% cost increase (Project RAND, Advanced Airframe Structural Materials, R-4016-AF) • - We can capture this effect by putting a 0.75 multiplier on airframe unit weight and a 1.35 multiplier on airframe cost per pound • We can also see a small cross functional impact • - Propulsion • - Aero Aluminum Composites 22-21
Design of UAV Systems c 2002 LM Corporation Integrated performance model Expectations • You should now understand • Integrated geometry and performance parametrics • Where they come from • How they are used • The limits of their applicability 22-22
Design of UAV Systems c 2002 LM Corporation Integrated performance model Intermission 22-23