Constraint Satisfaction Problems
Constraint Satisfaction Problems. KAIST CS570 lecture note based on AIMA and UCB slides & Slides by Park, Koo, Lee of 2003 KAIST class. Outline. What is CSP? CSP examples Solving CSP by search Backtracking search Heuristics for CSP search Local search Summary.


Constraint Satisfaction Problems
E N D
Presentation Transcript
Constraint Satisfaction Problems KAIST CS570 lecture note based on AIMA and UCB slides & Slides by Park, Koo, Lee of 2003 KAIST class
Outline • What is CSP? • CSP examples • Solving CSP by search • Backtracking search • Heuristics for CSP search • Local search • Summary
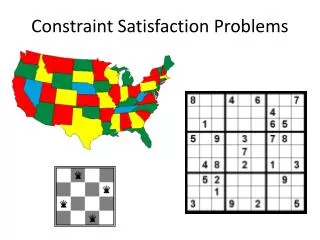
Constraint Satisfaction Problem : Example • Map-Coloring Problem
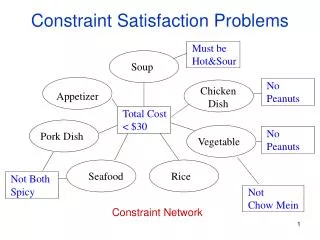
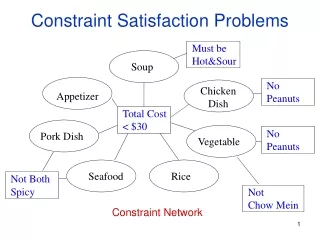
Constraint Satisfaction Problem • A special kind of problem: States are defined by values of a fixed set of variables variables : {X1, X2, …, Xn} Domain according to a variable Xi : (Di) Goal test is defined by constraints on variable values constraints : {C1, C2, … Cn} Solutions are assignment of Di to Xi satisfying all constraints • Each constraint restricts the combination of values that a set of variables may take simultaneously
Has different color VAR: WA,NT,SA,Q,NSW,V,T CSP : Terminologies • Consistent (or legal) assignment • An assignment that does not violate any constraints • Complete assignment • An assignment in which every variable is mentioned • Solution • A complete and consistent assignment • A complete assignment that satisfies all the constraints • Constraint graph • Node : variable • Arc : constraint
Formulation as Standard Search Problem • States • Set of value assignments to some or all of the variables • Initial state • The empty assignment {} • Successor function • Value assignment to any unassigned variable without conflicts with previously assigned variables • Goal test • Finding out the current assignment is complete • Path Cost • A constant cost
Benefits from treating a problem as a CSP • The successor function and goal test can be written in a generic way that applies to all CSPs. • We can develop effective, generic heuristics that require no additional domain-specific expertise. • The structure of the constraint graph can be used to simplify the solution process.
Example of CSP : 8-queen problem • Variables • {Q1,Q2,Q3,Q4,Q5,Q6,Q7,Q8} • Domain • Q1, …, Q8 ∊ {(1,1), (1,2), …, (8,8)} • Constraint set • No queen attacks any other
Classification of CSP : by variable’s domain • Discrete variables • Finite domains • 8-queen problem, map-coloring problem • Boolean CSP • Includes 3SAT(NP-complete) • => Don’t expect that in the worst case, we can solve finite-domain CSP in less than exponential time. • Infinite domains • Job scheduling • StartJob1 + 5 < StartJob3 • Continuous variables • Linear programming problem
Classification of CSP - by Constraints’ Characteristic • Absolute Constraint • Unary Constraint • Ex. SA ≠ green • Binary Constraint • Ex. SA ≠ WA • Higher-order Constraint • Ex. Crypt-arithmetic column constraints • Preference Constraint • ex) Prof. X might prefer teaching in the morning. • ex) red is better than yellow • A cost for each variable assignment • Many real-world CSP • Constrained optimization problems
Real-world CSPs • Assignment problems • Who teaches what class • Job-Shop scheduling • Timetabling Problems • Which class is offered when and where ? • Hardware configuration • Transportation scheduling • Floor-planning Notice that many real-world problems involve real-valued variables
Solving CSP by search : Backtracking Search • BFS vs. DFS • BFS terrible! • A tree with n!dn leaves : (nd)*((n-1)d)*((n-2)d)*…*(1d) = n!dn • Reduction by commutativity of CSP • A solution is not in the permutations but in combinations. • A tree with dn leaves • DFS • Used popularly • Every solution must be a complete assignment and therefore appears at depth n if there are n variables • The search tree extends only to depth n. • A variant of DFS : Backtracking search • Chooses values for one variable at a time • Backtracts when failed even before reaching a leaf. • Better than BFS due to backtracking, but still inefficient!!
function BACKTRACKING-SEARCH (csp) returns a solution, or failure return RECURSIVE-BACKTRACKING({}, csp) function RECURSIVE-BACKTRACKING(assignment, csp) returns a solution, or failure ifassignment is complete then returnassignment var SELECT-UNASSIGNED-VARIABLE(VARIABLES[csp], assignment, csp) for eachvalue in ORDER-DOMAIN-VALUES(var, assignment, csp) do ifvalue is consistent with assignment according to CONSTRAINTS[csp] then add {var=value} to assignment result RECURSIVE-BACKTRACKING(assignment, csp) ifresult != failurethen returnresult remove {var = value} from assignment return failure ☜ BACKTRACKING OCCURS HERE!! Solving CSP by search : Backtracking Search
Early failure-detection to decrease the likelihood to fail Restructuring to reduce the problem’s complexity Improving Backtracking Efficiency Variable & value ordering to increase the likelihood to success • Which variable should be assigned next? • Minimum Remaining Values heuristic • In what order should its values be tried? • Least Constraining Values heuristic • Can we detect inevitable failure early? • Forward checking • Constraint propagation (Arc Consistency) • When a path fails, can the search avoid repeating this failure? • Backjumping • Can we take advantage of problem structure? • Tree-structured CSP General purpose methods
Improving backtracking efficiency function BACKTRACKING-SEARCH (csp) returns a solution, or failure return RECURSIVE-BACKTRACKING({}, csp) function RECURSIVE-BACKTRACKING(assignment, csp) returns a solution, or failure ifassignment is complete then returnassignment var SELECT-UNASSIGNED-VARIABLE(VARIABLES[csp], assignment, csp) for eachvalue in ORDER-DOMAIN-VALUES(var, assignment, csp) do ifvalue is consistent with assignment according to CONSTRAINTS[csp] then add {var=value} to assignment result RECURSIVE-BACKTRACKING(assignment, csp) ifresult != failurethen returnresult remove {var = value} from assignment return failure
Heuristics for variable & value ordering • Variable selection • Most constrained variables • MRV(minimum remaining values) heuristic • Choose the variable with the fewest legal values. • Most containing variables • Degree heuristic • In first variable selection, MRV heuristic doesn’t help at all. • Use degree heuristic (selects the variable with the largest degree.) Tie-breaker !! • Value ordering • Least-Constraining-value heuristic • prefer variables that rule out fewest choices of neighbors
Heuristics for variable & value orderingExample for degree heuristic NT NT Q SA SA SA NT ={R, G} Q = {R, G} WA = {R, G} SA = B NSW = {R, G} V = {R, G} T = {R, G, B} 3 3 2 5 3 2 0 NT ={R, G, B},3 Q = {R, G, B},3 WA = {R, G, B},2 SA = {R, G, B},5 NSW = {R, G, B},3 V = {R, G, B},2 T = {R, G, B},0 NT = G Q = {R} WA = {R} SA = B NSW = {R, G} V = {R, G} T = {R, G, B}
Heuristics for variable & value orderingExample for MRV NT NT Q SA SA SA NT ={G, B} Q = {R, G, B} WA = R SA = {G, B} NSW = {R, G, B} V = {R, G, B} T = {R, G, B} NT ={R, G, B} Q = {R, G, B} WA = {R, G, B} SA = {R, G, B} NSW = {R, G, B} V = {R, G, B} T = {R, G, B} NT =G Q = {R, B} WA = R SA = {B} NSW = {R, G, B} V = {R, G, B} T = {R, G, B}
Heuristics for variable & value orderingExample for LCV Terminate search when any variable has no legal values Red in Q is least constraint value NT Q WA NT WA WA Q NT WA NT ={G, B} Q = {R, G, B} WA = R SA = {G, B} NSW = {R, G, B} V = {R, G, B} T = {R, G, B} NT ={R, G, B} Q = {R, G, B} WA = {R, G, B} SA = {R, G, B} NSW = {R, G, B} V = {R, G, B} T = {R, G, B} NT =G Q = {R, B} WA = R SA = {B} NSW = {R, G, B} V = {R, G, B} T = {R, G, B} NT =G Q = R WA = R SA = {B} NSW = {G, B} V = {R, G, B} T = {R, G, B} NT =G Q = B WA = R SA = ? NSW = {R,G} V = {R, G, B} T = {R, G, B}
Forwarding checking(1/4)Heuristics for early failure-detection • How can we find out which variable is minimum remaining? • What does eliminate the values from domain? NT = red, Q = green WA = {red, green, blue} SA = {red, green, blue} NSW = {red, green, blue} V = {red, green, blue} T = {red, green, blue} ⅹ ⅹ ⅹ ⅹ
Forwarding checking(2/4)Heuristics for early failure-detection • Forward checking • A variable X is assigned. • Looks at each unassigned variable Y connected to X by a constraint • Deletes any values of Y’s domain that is inconsistent with X • If there is any Y with empty domain, undo this assigning. Backtrack!! If not, MRV !! • Forward checking is an obvious partner of MRV heuristic !! MRV heuristic is activated after forward checking.
Heuristics for early failure-detectionForwarding checking(3/4) – an example NT Q WA SA NSW V T
Heuristics for early failure-detectionForwarding checking(4/4) - Heuristic flow Forward Checking Yes Tie? No Degree heuristic Select the MRV Forward Checking Select the LCV Goal?
ⅹ o Heuristics for early failure-detectionConstraint propagation: arc consistency • F/C propagates information from assigned to unassigned variables, but doesn’t provide early detection for all failures • Simplest form of propagation makes each arc consistent • The (directed) arc (XY) isconsistent ≡ For all x ∊ X, there is some y ∊ Y. • If X loses a value, neighbors of X need to be rechecked
Heuristics for early failure-detectionConstraint propagation: arc consistency • Detects an inconsistency that is not detected by pure F/C. • Detect failure earlier than forward checking • Makes CSP possibly with reduced domain. • Provides a fast method of constraint propagation O(n2d3) n2 : the maximum number of arcs d : the maximum number of insertion for one node d2 : the number of forward checking • Can be run as a preprocessor or after each assignment
O(n2d3) Heuristics for early failure-detectionConstraint propagation: arc consistency function AC-3(csp) returns the CSP, possibly with reduced domains inputs: csp, a binary CSP with variables {X1, X2, …, Xn} local variables:queue, a queue of arcs, initially all the arcs in csp whilequeue is not empty do (Xi,Xj) REMOVE-FIRST(queue) if REMOVE-INCONSISTENT-VALUES(Xi,Xj) then foreachXkin NEIGHBORS[Xi] do add(Xk,Xi) to queue function REMOVE-INCONSISTENT-VALUES() returns true iff we remove a value removed false for eachx in DOMAIN[Xi] do if no value y in DOMAIN[Xj] allows (x,y) to satisfy the constraint between Xiand Xj thendelete x from DOMAIN[Xi]; removed true returnremoved
Heuristics for early failure-detectionSpecial constraints – Alldiff • Problem-dependent constraints • Alldiff constraint • If there are m variables involved in the constraint and n possible distinct values, m > n inconsistent for Alldiff constraint • An example • 3 variables: NT,SA,Q • NT, SA, Q ∊ {green, blue} • m=3 > n=2 • inconsistent WA NSW
Heuristics for early failure-detectionSpecial constraints – Almost • Resource constraint • Atmost constraint (Use limited resource) • An example • Totally, no more than 10 personnel should be assigned to jobs. • Atmost(10, PA1, PA2, PA3, PA4) • Job1~4 ∊ {3,4,5,6} ( min value = 3 ) • 3+3+3+ 3 > 10 (minimum resource 12 but available resource 10) • inconsistent • Job1~4 ∊ {2, 3,4,5,6} • 2+2+2+2 <10 (consistent) • 2+2+2+5(or 6) > 10(inconsistent) • Delete 5,6 from domain
Heuristics for early failure-detection - Backjumping • The weakness of Backtracking • If failed in SA, backtrack to T. • But, T is not relevant to SA. • Backjumping • Backtracks to the most recent variable in the conflict set. • Conflict set : the set of variables that caused the failure • If failed in SA, backjump to V. 1 Q NSW 2 5 V 3 Next variable T 4
Demo Applets • From MIT Open courseware • Constraint-Propagation and Resource Allocation Java® Demonstration • From UBC, Canada • http://www.cs.ubc.ca/labs/lci/CIspace/Version4/Constraint/
General Heuristic for complexity reduction • Decompose into many sub-problems. • Independent sub-problems • Solve them respectively • Ex) The mainland and Tasmania. • Analysis of connected components of constraint graph
Algorithm for Tree-structured CSP • If constraint graph is a tree, we solve the CSP in time linear in the number of variables 1. Choose a variable as root 2. Order variables from root to leaves such that every node’s parent precedes it in the orderingMakes constraint graph arc-consistent 3. For j from n down to 2, apply arc consistency to the arc(parent(Xj), Xj) Just finds a consistent value.(no backtrack because of arc-consistency) 4. For j from 1 to n, assign Xj consistently with Parent(Xj) • Time complexity : O(nd2)
Heuristics for complexity reductionTransforming to Tree-Structured CSP • Conditioning • Instantiate a variable, prune its neighbor’s domains • Cutset conditioning • Instantiate a set of variable such that the remaining graph is tree • S is called cycle cutset when constraint graph is a tree after the removal of S • Time Complexity : O(dc(n-c)d2) • c : cutset size • dc: the # of possible cutset assignment : • Time complexity in tree-structred CSP : (n-c)d2 • Runtime O(dc . (n-c)d2)
Heuristics for complexity reductionTransforming to Tree-Structured CSP
Iterative algorithm with Min-conflicts heuristic • Initially assigns a (random) value to every variable • reassign the value of one variable at a time • Variable selection : • randomly select any conflict variables • minimum of conflicts with other variables • Hill-climb with h(n) = total number of violated constraints • Min-conflicts is effective for many CSPs • particularly with reasonable initial state • Specially important in scheduling problems • Airline schedule (when the schedule is changed)
Summary • CSPs are a special kind of problem • States defined by values of a fixed set of variables • Goal test defined by constraints on variable values • Backtracking = depth-first search with one variable assigned per node • Variable ordering and value selection heuristics help significantly • Forward checking prevents assignments that gurantee later failure • Constraint propagation (e.g. arc consistency) does additional work to constrain values and detect inconsistencies • The CSP representation allows analysis of problem structure • Tree-structured CSPs can be solved in linear time • Iterative min-conflicts is usually effective in practice