Download
1 / 17
170 likes | 322 Vues
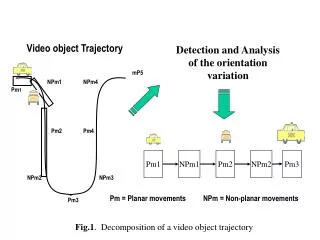
Detection and Analysis of the orientation variation. Video object Trajectory. mP5. NPm1. NPm4. Pm 1. Pm2. Pm4. Pm1. NPm1. Pm2. NPm2. Pm3. NPm2. NPm3. Pm = Planar movements. NPm = Non-planar movements. Pm3. Fig.1 . Decomposition of a video object trajectory. - Original VOP ’s

E N D
Detection and Analysis of the orientation variation Video object Trajectory mP5 NPm1 NPm4 Pm1 Pm2 Pm4 Pm1 NPm1 Pm2 NPm2 Pm3 NPm2 NPm3 Pm = Planar movements NPm = Non-planar movements Pm3 Fig.1. Decomposition of a video object trajectory
- Original VOP ’s - VOP ’s masks Translation estimation Planar motion analysis Divergence estimation Rotation estimation Mapping quality evaluation Quality Criteria Valid planar motion model Invalid Planar motion model Estimation of the rotation axis of a non-planar motion Non -Planar motion analysis Estimation of the angle rotation of a non-planar motion Occlusion zone Fig.2. General outline of the proposed approach
Estimation de la divergence • Modèle de divergence (appliqué entre les VOP1 et VOP2) x, y VOP xg, yg centre de gravité • Le changement d’échelle peut être déterminé par l'équation suivante. S= surface d’un VOP
VOP Référence Centres de gravité des VOPs (cgx1,cgy1) (cgx2,cgy2) Tx = cgx1-cgx2 Ty = cgy1-cgy2 VOP-22 VOP-26 Σ Image d’erreur VOP’
VOP’ VOP-26 Image d’erreur Surfaces des VOPs: S2 >S1 Σ VOP’’
Estimation de la rotation distancemax distancemax droites tangentes droites tangentes VOP2 VOP1 Φ
VOP’’ VOP-26 VOP-26 Φ Image d’erreur Image d’erreur VOP’’’ Σ
Evaluation de la qualité de la mise en correspondance 1er Critère: 2e Critère: Pourcentage des pixels non compensés 3e Critère: Modification du calcul de l ’EQM 4e Critère: Pourcentage des pixels non compensés
Estimation du mouvement Non-Plan a) Estimation de l ’axe de rotation b) Estimation de l ’angle de rotation VOP-26 VOP Référence (cgx1,cgy1) (cgx1,cgy1) (cgx1,cgy1) VOP-22 VOP-27
X X Estimation de la direction de l ’axe de rotation Y Y A B X A’ B’ Y Y A’ B’ A’ B’
VOPt+n VOPt A1 A1’ cg X X A2 A2’ VOPt VOPt+n Y Y D D P1+ P2+ X X P1- P2-
Pm NPm NPm NPm Pm kI1 kI4 kI5 kI9 kI11 kI14 NPm NPm NPm Pm Pm kI15 kI17 kI19 kI20 kI22
Pm Pm NPm NPm NPm NPm NPm NPm S NPm NPm NPm NPm NPm NPm S
A) Pm NPm NPm NPm Pm Pm Pm B) S C) Pm Pm NPm NPm NPm NPm NPm NPm D) S E) NPm NPm NPm NPm NPm NPm F) S G) NPm NPm Pm Pm NPm NPm H) S