Download
1 / 25
300 likes | 686 Vues
Introduction to Computational Photography. What is Computational Photography?. Second breakthrough by IT First : electronic image sensor (digital camera) Digital representation of “image formed by lens” Second : Re-definition of whole camera (optics, usage)

E N D
What isComputational Photography? • Second breakthrough by IT • First : electronic image sensor (digital camera) • Digital representation of “image formed by lens” • Second : Re-definition of whole camera (optics, usage) • Image is reconstructed by computation Image sensor Film camera Image processing Image Optics Digital Camera Computational Photography Whole part of camera is affected by computational photography Digital Camera
What is camera? Light source • Camera is a machine to record the distribution of the light in a scene • How to represent the distribution of the light in the scene? • 3-D coordinate of the point where the light passing through : X, Y, Z • Direction of the light : θ,Φ • Wavelength of the light (color of the light) : λ • Time : t • The 7 parameters function P which represent the distribution of the light is called “Plenoptic function” Light field (Light space) Object
Integration of camera • Camera integrates the light for all 7 parameters • Position(range of X, Y, Z : aperture size should not be zero) • Direction(range of θ,Φ : pixel size is not zero) • Wavelength( range of λ : No single wavelength filter) • Exposure time ( range of t : shutter speed should not be too fast) • Multiple samples - θ,Φ:number of pixel, λ:RGB,t : burst shot • So, what is multiple sampling for X, Y, Z? Light field (light ray) Optics (lens) Image sensor (pixel)
Camera array The StanfordMulti-Camera Array (Marc Levoy @Stanford University) • Measuring the distribution of the light at multiple position ProFUSION25 (ViewPlus, Inc.)
Use of camera array • Free-viewpoint image • Defocus generation by synthetic aperture 3-D video (Matsuyama lab, Kyoto Univ.) Synthetic aperture(Vaish@Stanford)
Defocus control by Uncalibrated Synthetic Aperture Natsumi Kusumoto, Shinsaku Hiura and Kosuke Sato, Uncalibrated Synthetic Aperture for Defocus Control, CVPR2009 (Jun. 2009)
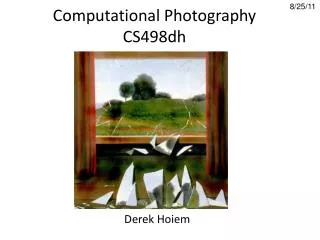
Reviewing “integration” • Some part of information is lost by integration • Sine wave which period is just as same as the integration duration is lost • Blur of object within an exposure time • Defocus by misfocus × = 0
Coded Exposure • Coded exposure : exposure is coded in time axis Flutter Shutter Camera (Raskar@MERL)
This Coded Exposure Traditional Deblurred Image Deblurred Image Image of Static Object Slide by R. Raskar
Coded Aperture Spatial 2-D broadband mask: Focus Deblurring Coded Exposure Temporal 1-D broadband code: Motion Deblurring Slide by R. Raskar
Captured Blurred Photo Slide by R. Raskar
Refocused on Person Slide by R. Raskar
Coded Aperture • Levin@MIT(2007) • Depth estimation by single image (manual operation is necessary)
Coded Aperture • Levin@MIT(2007)
Coded Aperture • Levin@MIT(2007)
Multi-focus camera withCoded Aperture • Stabilizing the depth estimation and deblur by coded aperture • Simultaneous capture of 3 images with different focused distance Hiura et al,CVPR(1998), SSII(1999)
Invariant integration • Defocus : changed according to the distance • Blur : changed according to the speed of the object • Reconstruction is not easy because the estimation of the speed or distance is necessaryIs it possible to make defocus or blur invariant to the distance or speed?
Invariant integration • Defocus • Special optics : Wavefront Coding • Motion of the image sensor while exposure • Blur • Reciprocal motion of the camera CDM Optics, Inc.
Motion of the image sensorfor invariant defocus • H. Nagahara, S. Kuthirummal, C. Zhou, and S.K. Nayar, Flexible Depth of Field Photography, ECCV2008
Motion of the image sensorfor invariant defocus • H. Nagahara, S. Kuthirummal, C. Zhou, and S.K. Nayar, Flexible Depth of Field Photography, ECCV2008
Deblur by reciprocal motion of the camera • A. Levin, P. Sand, T. S. Cho, F. Durand, W. T. Freeman. Motion-Invariant Photography. SIGGRAPH2008. Input image Deblurred image
Deblur by reciprocal motion of the camera • A. Levin, P. Sand, T. S. Cho, F. Durand, W. T. Freeman. Motion-Invariant Photography. SIGGRAPH2008. Equipment Conceptual figure for Light sources with different speed
More.. • Resources on www • Wikipedia : computational photography • http://computationalphotography.org/ • http://www1.cs.columbia.edu/CAVE/projects/what_is/ • http://projects.csail.mit.edu/photo/ • Conferences • International Conference on Computational Photography • SIGGRAPH, CVPR, .. Session about computational photography