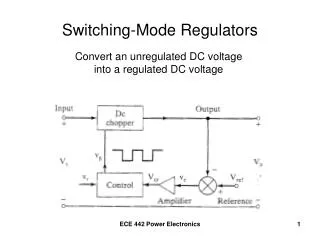
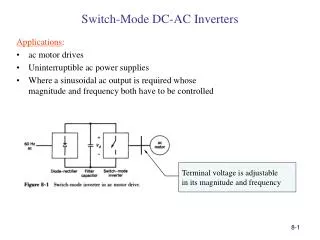
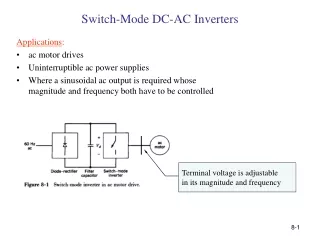
Switch- Mode Regulators
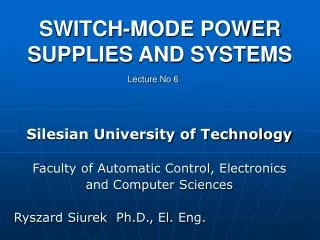
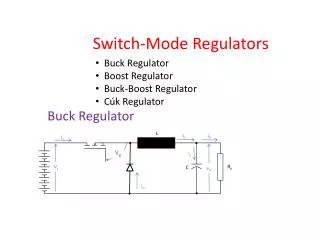
Switch- Mode Regulators. Buck Regulator Boost Regulator Buck-Boost Regulator Cúk Regulator. Buck Regulator. L. i L. i 0. i s. v g. i c. R o. V s. C. v o. i D. v g. For 0 ≤ t ≤ KT v s – v o = L ∆ i L / (KT) assuming that v o ≈ constant

Switch- Mode Regulators
E N D
Presentation Transcript
Switch-Mode Regulators • Buck Regulator • Boost Regulator • Buck-Boost Regulator • Cúk Regulator Buck Regulator L iL i0 is vg ic Ro Vs C vo iD
vg • For 0 ≤ t ≤ KT • vs – vo = L ∆ iL / (KT) assuming that vo ≈ constant • then, ∆ iL = K (vs – vo) / (f L) …..(1) • where ∆ iL = iLmax- iLmin • For KT ≤ t ≤ T • vo = L ( - ∆ iL /(T-KT) • ∆ iL = vo (1-K) / (f L) …..(2) • equating (1) and (2), • then, K (vs – vo) / (f L) = vo (1-K) / (f L) • then , Vo = K Vswhere Vo is the average value of vo • Another method; • Noting that is = iL in the interval 0 ≤ t ≤ KT Vo Vs t 2T T T+KT KT 0 iL iLmax io K iLmin 0 1 t 2T T T+KT KT 0 ic t T+KT KT 0 2T T is iLmax io vo iLmin ∆vo (exaggerated!) 2T T+KT KT 0 T t noting that Vs Is = Vo Io and, Vo = K Vs 2T T T+KT KT 0 then, Is = K io
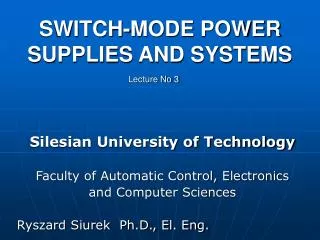
vg Ic is the average rectified value of ic Ic = ½ T/2 ∆IL/2 = ⅛ ∆IL /f ∆ Vo = 1/C . Ic = ∆IL / (8fC) = vo (1-K) / (8f2LC) t 2T T T+KT KT 0 Boost Regulator For 0 ≤ t ≤ KT mode 1 L iD i0 is ic Ro Vs C is vo vg Vs i0 vg ic Ro vo
is ismax mode (2) For KT ≤ t ≤ T Is ismin t 2T T T+KT KT 0 iC is Is – Io For 0 ≤ t ≤ KT Vs = L ∆ is / (KT) ∆ is = KVs/(fL) …(1) For KT ≤ t ≤ T Vs – Vo = - L ∆ is /(T-KT) ∆ is = (1 – K) (Vo – Vs) / (fL) …(2) then, K Vs = (1 – K) (Vo – Vs) Vo = Vs / (1 – K) t Io . K T = (Is –Io) . ( T – KT) then, Is = Io / (1-K) ∆ Vo = 1/C . (Io . KT) ∆ Vo = K Io / f C 2T T+KT KT 0 T Io iD is i0 vo ic ∆vo Ro Vs C vo t 2T T T+KT KT 0 Vo ! 2Vs Vs K 0 0.5 1
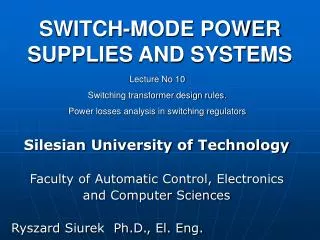
Buck-Boost Regulator is vg vg t 2T T T+KT KT 0 Ro Vs L iL C vo iL iLmax ic io iLmin i0 iD for 0 ≤ t ≤ KT is iLmax t is 2T T T+KT KT 0 iLmin t 2T 0 KT T T+KT iD Ro C vo Vs L iL iLmax iLmin ic io t 2T 0 i0 KT T T+KT Mode 1 Is K = Io (1 – K) Is = K / (1-K) . Io Vs = L ∆ iL / KT ∆ iL = K Vs / (f L)
from mode 1 : Vs = L ∆ Is / (KT) ∆ Is = K Vs / (fL) …(1) from mode 2 : Vo = L ∆ Is/ (T - KT) ∆ Is = (1 – K) Vo /( fL) …(2) then, K Vs = ( 1-K ) Vo Vo = K Vs / (1-K) ∆ vC = 1/C . KTIo ∆ vC = K Io / (fC) Ro L iL C vo Vo ic ! i0 iD Vs K For KT ≤ t ≤ T mode 2 0 1 iC 0.5 t 2T 0 KT T T+KT IC vC ∆vC t 0 KT T 2T T+KT
Ćuk Regulator vg L2 L1 C1 is i0 t 2T T T+KT KT 0 Vs Ro vo 2C vg ic iD iL2 L2 L1 C1 iL1 iL2 _ + VC1 Mode 1 For 0 ≤ t < KT Vs Ro vo 2C ic i0 iL2
L2 L1 C1 iL2 Mode 2 For KT ≤ t < T _ + VC1 Vs Ro vo 2C ic i0 iL2 For 0 ≤ t < KT Vs = L1 ∆ IL1/(KT) (1) ∆ IL1 = K Vs /(fL1) For KT≤ t < T Vs – VC1 = - L1 ∆ IL1/(1-K)T (2) Substituting from (1) into (2), Vs – VC1 = - K /(1-K) Vs VC1 =[(1 + K/(1-K) ] Vs VC1 = Vs /(1-K) • For 0 ≤ t < KT • VC1 – Vo = L2 ∆ IL2/(KT) (3) • For KT≤ t < T • Vo = - L2 ∆ IL2/(1-K)T (4) • Substituting from (3) into (4), • – Vo = - K ( VC1 – Vo ) / (1-K) • Vo = K VC1 • Vo = K/(1-K) Vs iL1
iL1 iL1max for 0 < t ≤ KT Vc1 – Vo = L2 ∆IL2 / (KT) ∆IL2 = K ( VC1 – Vo ) / (fL2) ∆IL2 = K [ Vs /(1-K) – KVs /(1-K) ] / (fL2) ∆IL2 = K Vs / fL2 iL1min t T KT iL2 iL2max Io iL2min iC1 iL2max Io iL2min t vc1 KT t T KT T ∆vC1 (exaggerated!) -iL1max t -iL1min KT T
iC2 Vs Is = Vo Io Vs Is = K Vs /(1-K) . Io Is = K/(1-K) . Io ∆ vC1 = 1/C1 . ∫ iC1dt = Io T K/C1 ∆ vC1 = K Io/(fC1) ∆ vo= 1/C2. ∫ iC2dt = 1/C2 . ½. T/2. ½ ∆IL2 ∆ vo= K Vs / (8f2C2L2) t KT T T+KT 2T vo (exaggerated!) ∆Vo t