The Self Organizing Fuzzy PID Controller
The Self Organizing Fuzzy PID Controller. 老師 : 曾慶耀 教授 學生 : 陳德霖. Abstract. Conceptual development of a SOF-PID controller and applies it to a non-linear revolute-joint robot-arm.

The Self Organizing Fuzzy PID Controller
E N D
Presentation Transcript
The Self Organizing Fuzzy PID Controller 老師:曾慶耀 教授 學生:陳德霖
Abstract • Conceptual development of a SOF-PIDcontroller and applies it to a non-linear revolute-joint robot-arm. • SOF-PID controller produced a smaller steady state error and a negligible overshoot compared to the SOF controller, the PID controller and the Self-tuning controller.
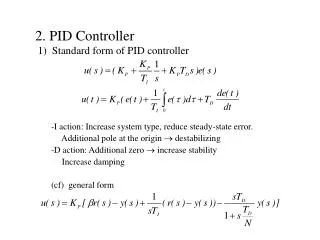
Introduction • A fuzzy controller can act as a master controller readjusting the PID gains at the actuator level to compensate for the PID’s short falls. • the rule-based fuzzy PID is a non-learning controller, and the difficulty with this type of controller is that the rules are pre-written in the rule base block copying the experience of a human operator.
The way the SOF-PID controller works is that, the PID gains are tuned initially using conventional tuning methods. • fuzzy logic control theory uses linguistic statements in place of numerical values.
Design Aspects of SOD-PID Controller • Further reduction in the steady state error, overshoot and rise time is required • Retuning the gains Kp,Ki and Kd, improves some part of the output response and worsens the other part
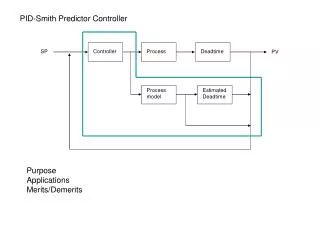
Structure of the SOF-PID controller • Figure 1 shows the structure of a Single-Input Single-Output SOF-PID controller.
Function Kpi=Kpi-n +P (3) Kii=Kii-n+P (4) Kdi=Kdi-n+P (5) Kp=Kp+Upi*K1 (6) Ki=Ki+Uii*K2 (7) Kd=Kd+Udi*K3 (8)
DC motor dynamics of the robot-arm • A second order differential equation was used to present the dynamics of a DC motor and load
Experiments for a step input • Experimental results of the SOF-PI0 controller applied to a non-linear revolute-joint robot-am are studied and compared with the SOF controller, the PID controller and the Self-tuning controller.
For the step input two sets of experiments were carried out using the SOF-PID controller,labelled as method I and method II.
The experimental results (I) - methodI • The PID gains were tuned initially, without the SOF master controller. Firstly, large values of KP were chosen and gradually Kp values were decreased until the time the process output overshoot was minimized.
The experimental results (II) - methodII • The process was first controlled using Kp only. The PID gain Kp, was slowly increased until continuous oscillations resulted.
Conclusion • the objectives for the SOF-PID controller were: to achieve a good damping around the setpoint; to produce no overshoot as the setpoint being approached, and to reduce the steady state error.