Dynamic Set ADT Binary Trees
Dynamic Set ADT Binary Trees. Gerda Kamberova Department of Computer Science Hofstra University. Overview. Dynamic set ADT Some implementations an their complexities Graphs Trees Binary trees (BT) Binary search trees (BST) Implementation of Dynamic Set ADT with BST

Dynamic Set ADT Binary Trees
E N D
Presentation Transcript
Dynamic Set ADTBinary Trees Gerda Kamberova Department of Computer Science Hofstra University G.Kamberova, Algorithms
Overview • Dynamic set ADT • Some implementations an their complexities • Graphs • Trees • Binary trees (BT) • Binary search trees (BST) • Implementation of Dynamic Set ADT with BST • Complexity of the operations G.Kamberova, Algorithms
Dynamic Set ADT • Full set of operations: Min, Max, Predecessor, Successor, Insert, Delete, Search • Implementation • Linked lists: worst-case for search, O(n) • Sorted array: worst-case for insert or delete, O(n) • BST : all operations are O(h) in worst-case, where h is the height of the tree. In worst-case h = n-1. • The height of a randomly built BST with n nodes is O(lg n) Can’t guarantee that a tree is built at random. • Variations of BT that keep the trees balanced achieve O(lg n). Those include AVL trees, Red-black trees, B-trees. B-trees are for maintaining a database on a random access storage G.Kamberova, Algorithms
Graphs • Undirected graphG=(V,E) consists of two finite sets • Walk: an alternating sequence of vertices and edges, starting and ending in a vertex, s.t. each edge is incident on the two vertices immediately preceding and following it. • Closed walk: begins and ends at the same vertex • A path: a walk in which no vertex is repeated; the length of the path is the number edges in it • If there is a path from u to v, v is reachable from u • Cycle: closed path • Acyclic graph: without cycles • Connected graph: at least one path exists between every pair vertices G.Kamberova, Algorithms
Trees • Tree: connected acyclic graph • Trees are one of the most important data structures • Used to impose hierarchical structure on a problem or collection of data • Rooted tree: one vertex, root, is distinguished from the rest. We will work with rooted trees. • Children of the root: vertices connected to the root with an edge ; the root is a parent of its children. This definition is extended to the children of the root, etc. • The root does not have a parent • Siblings: vertices with the same parent • Leaf (external node): a node with no children • Internal node: vertex other than leaf • Vertex v is a descendent of u, if v is a child of u, or a child of one of the children of u, etc. Then u is an ancestor of v. • All descendents of a vertex form a subtree • Height of a vertex v: the length of the longest path from v to a leaf. Height of the tree is the height of the root. • Depth (level) of a vertex v: the length of the path from the root to v • Ordered tree: siblings are linearly ordered (first, second, etc) G.Kamberova, Algorithms
Binary Trees (BT) • BT: an ordered tree in which each vertex has 0, 1 or 2 children • If a vertex has 2 children, the first childe is the “left”, the second is the “right” • If a vertex has one child, it can be positioned either as left or right • If we define an empty tree as a tree with no nodes, a binary tree T, is often defined recursively: T is a BT if • T is empty • T has a left and right subtrees that are BTs • For a node u, parent(u), left(u) and right(u) denote the partme, left and right child of u • Full BT: every vertex has 2 children or is a leaf • Perfect BT: all leaves have the same depth • Complete BT: a BT that is “almost perfect”; what may differentiate it from a perfect tree that is may miss only most right leaves. • K-ary trees: extends the BT concepts to a tree where each node has 0,1,2,3,…, or k children. (BT is 2-ary tree). G.Kamberova, Algorithms
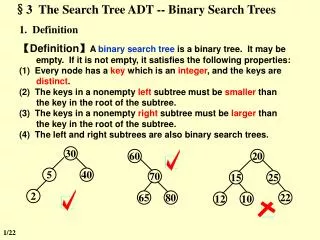
BST • BST: a BT in which the keys of the nodes are filled in such a way that satisfy the binary search tree property (BSTP): • for any non-leaf node u, • key(left(u)) < key(u), if left(u) exists • key(u) < key(right(u)), if rightI(u) exists. • Note: • All keys in the left subtree of u are less than key(u) • All keys in the right subtree of u are larger than key(u) • Key values on the same level are sorted in increasing order • For fixed n, max height, n-1, is obtained when the n-node tree is degenerate, and min, \log n, when the tree is complete. m q h c k x a j l G.Kamberova, Algorithms
Traversals • visit u means visit the node u and execute specified operations at the node. • Preorder traversal: • Visit the root • Traverse in preorder the left subtree • Traverse in preorder the right subtree • Inorder traversal: • Traverse in inorder the left subtree • Visit the root • Traverse in inorder the righjt subtree • Postorder traversal: • Traverse in postorder the left subtree • Traverse in postorder the right subtree • Visit the root. G.Kamberova, Algorithms
BST example traversals • Preorder m, h, c, a, k, j, l, q, x • Inorder a, c, h, j, k, l, m, q, x • Postorder a, c, j, l, k, h, x, q, m m q h c k x a j l G.Kamberova, Algorithms
Traversals • Implementation: easy recursively • v is the root iff parent(v)=NULL • v is a leaf iff left(v)=right(v) = NULL • Pseudo code for inorder traversal: inorder(v) // inorder traversal of the BST rooted in v if v is not NULL // if the tree is not empty inorder(left(v)) visit v inorder( right(v) ) • Theorem: Given a BST, T, inorder visits the nodes in sorted order of the keys. Proof: by induction on h G.Kamberova, Algorithms
Search • Search a BST for a key k; return the node with key k if found, NULL otherwise. Search(v, k) //search tree rooted in v for key k if v == NULL or k == key(v) return v if k < key(v) Search(left(v), k) else Search(right(v),k) • The vertices encountered during any search are along a path from the root towards a leaf. • Time complexity: in worst case we'll traverse the longest path. thus the Search is O(h). G.Kamberova, Algorithms
Search • Iterative implementation Search(v, k) //search tree rooted in v for key k while (v is not NULL and key(v) not equal to k) if key < key(v) v = left(v) else v = right(v) return v G.Kamberova, Algorithms
Trace BST search v • search(v,k) returns right(left(v)) • search(v, r) returns right(left(v)) which is null, thus not found m q h null c k x a j l G.Kamberova, Algorithms
Min/Max node in BST • Min the node with min key. It is the left-most node (not necessary a leaf) , going down-left from the root : ex “c” • Max is the node with the max key. It the right-most node (not necessary a leaf) going down-right from the root: ex “y” • Implementation maximum(v) while v is not NULL p = v //storeparent v = right(v) return p • Time complexity: O(h). m q h x c k y e j l G.Kamberova, Algorithms
Predecessor node of a node in BST Ex: predecessor(v) is w • Predecessor of v: the node with key immediately preceding the key of v,( if exists, otherwise NULL • The ordering is with respect to the sorted keys (the inorder ordering). • Let v be a node s.t. that is has not NULL predecessor, then: • If v has a left subtree, the predecessor of v is the max in left(v). Ex: w • v does not have a left subtree, then the predecessor of v is the most recent ancestor of v which contains v in a right subtree, i.e., the lowest ancestor of v whose right child is also an ancestor of v. (v an ancestor of itself.) m q v h x e k y w g j l u predecessor(u) is v G.Kamberova, Algorithms
Predecessor • preddecessor(r, v) finds the predecessor of v in the tree rooted in r. • If it exists, it is either • the max in the left subtree of v, if it left(v) exists, • or it is the lowest ancestor, p, of v whose right child is also an ancestor of v. In this case, from v go up the direct path to the root untill you hit p. • Pseudocode predecessor(r, v) if left(v) is not NULL return maximum(left(v)) p = Parent(v); while (p is not NULL and v == left(p)) v = p p = Parent(p) return p • Time complexity for predecessor and sucessor: O(h) p p p v G.Kamberova, Algorithms
Successor node of a node in BST Ex: successor(w) is v • Sucessor of v: the node with key immediately following the key of v,( if exists, otherwise NULL) • The ordering is with respect to the sorted keys (the inorder ordering). • Let v be a node s.t. that is has not NULL successor, then: • If v has a right subtree, the sucessro of v is the min in right(v). • If v does not have a right subtree, then the successor of v is the most recent ancestor of v which contains v in a left subtree, i.e., the lowest ancestor of v whose left child is also an ancestor of v. (v an ancestor of itself.) m q v h h x e k y w g j l u successor(v) is u G.Kamberova, Algorithms
Insert a node in BST • To insert a new record : • Create the record to hold the key and the data, and get pointer to it • Find the place in BST where the new object has to be attached • do search for the key to find the place • Attach the new object, making a new leaf as left or right child depending on the key value. • New items are inserted only as leaves. • Ex: insert d, i, o m q h c k x a j l G.Kamberova, Algorithms
Insert a node in BST • To insert a new record : • Create the record to hold the key and the data, and get pointer to it • Find the place in BST where the new object has to be attached • do search for the key to find the place • Attach the new object, making a new leaf as left or right child depending on the key value. • New items are inserted only as leaves. • Ex: insert d, i, o m q h c k o x a d j l i G.Kamberova, Algorithms
Insert • Example: • build BST tree by successfully inserting in an empty tree 15, 6, 3, 18, 4, 7, 20, 13, 2, 9, 17 • Trace the search on 9, 3, 19 • Find predecessor of node with key 4, 17, 2 • Find successor of node with key 20, 6, 4 G.Kamberova, Algorithms
Insert Implementation • Assume that new object has been created, and that u is a pointer to it insert(v, u) { //insert node u in the BST rooted in v // returns the root if v == NULL return v//make v the root // search for place for the new node, as long as not encountered while (v != NULL and key(v)!= key(u)) p = v if key(u) < key(v) v = left(v) else v = right(v) if key(u)<key(p) left(p)=u// insert left else right(p)=u // insert right return v } • Time complexity: clearly $O(h)$ G.Kamberova, Algorithms
Delete u • Search for the k • If k is not found do nothing. • If k is found, let u denote the vertex with key k. • Remove the node with key k. There are three cases: • deleting a leaf; • deleting a vertex with one child • deleting a vertex with 2 children • Case 0: u is a leaf, trivial. • Case 1: u has one child; simple, attach the child to parent(u) p • Case 2: u has 2 children • Copy u’s inorder predecessor content over u’s content • Delete the node of the predecessor. • Note that since u has two children, the predecessor m is max in the left subtree, and m has less than 2 children, so deleting the node of the predecessor brings us to one of the two previous cases p m G.Kamberova, Algorithms
Example • First by successfully inserting in an empty tree 15, 6, 3, 18, 4, 7, 20, 2, 13, 9, 17 • Next delete: 2, 3, 13, 18 G.Kamberova, Algorithms
Example • Build by successfully inserting in an empty tree 15, 6, 3, 18, 4, 7, 20, 2, 13, 9, 17 • Delete 2,3, 13, 18 • Complexity: O(h) 17 15 18 6 4 20 17 7 3 9 4 13 2 9 G.Kamberova, Algorithms
Delete Implementation • Assume that node u that contains the key to be deleted has been found, u is not NULL Delete(v, u) //delete u from the subtree v if left(u) == NULL and right(u) == NULL // case 0 if parent(u)==NULL v = NULL // empty tree p = parent(u) if u == left(p) then left child of p is NULL else right child of p is NULL return if left(u)==NULL or right(u)==NULL // case 1 if parent(u)==NULL v=the child of u else p = parent(u) if u == left(p) left child of p = the child of u else right child of p = child of u return q = Maximum(left(u)) // case 2 copy key and data from q to u Delete(v,q) return G.Kamberova, Algorithms
Preview of coming attractions • Build a BST from an empty tree by inserting (A,Z,B,Y,C,X,D) in this order • Another approach: chose the keys to be inserted from the sequence given at random • For a randomly constructed BST, BST with random insertions, on average search takes O(lg n) • And another approach: restrict somehow the height of the tree to O(log n), all operations will be O(log n) in worst case. • Obviously insert and delete will have overhead G.Kamberova, Algorithms