Download
1 / 45
450 likes | 560 Vues
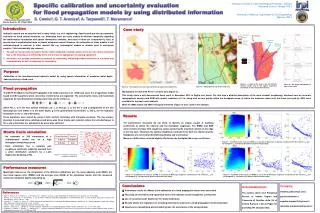
Amos Y. Johnson & Aaron Bobick. STATISTICAL METHODS FOR COMPUTATIONAL EXPERIMENTS IN VISUAL PROCESSING & COMPUTER VISION NIPS 2002. Parametric measures to estimate and predict performance of identification techniques. Setup – for example. Given a particular human identification technique.

E N D
Amos Y. Johnson & Aaron Bobick STATISTICAL METHODS FOR COMPUTATIONAL EXPERIMENTS IN VISUAL PROCESSING & COMPUTER VISION NIPS 2002 Parametric measures to estimate and predict performance of identification techniques
Setup – for example • Given a particular human identification technique
x Setup – for example • Given a particular human identification technique • This technique measures 1 feature (q) from n individuals - 1D Feature Space -
x Setup – for example • Given a particular human identification technique • This technique measures 1 feature (q) from n individuals • Measure the feature again - 1D Feature Space -
x Setup – for example • Given a particular human identification technique • This technique measures 1 feature (q) from n individuals • Measure the feature again Probe Gallery - 1D Feature Space -
x Setup – for example • Given a particular human identification technique • This technique measures 1 feature (q) from n individuals • Measure the feature again Target Probe Gallery For template - 1D Feature Space -
x Setup – for example • Given a particular human identification technique • This technique measures 1 feature (q) from n individuals • Measure the feature again Target Imposters Probe Gallery For template - 1D Feature Space -
Target Imposters Probe x Gallery For template - 1D Feature Space - Question • For a given human identification technique, how should identification performance be evaluated?
Target Imposters Probe x Gallery For template - 1D Feature Space - Possible ways to evaluate performance • For a given classification threshold, compute • False accept rate (FAR) of impostors • Correct accept rate (HIT) of genuine targets
Possible ways to evaluate performance • For various classification thresholds, plot • MultipleFAR and HIT rates (ROC curve)
Possible ways to evaluate performance • For various classification thresholds, plot • MultipleFAR and HIT rates (ROC curve) • Compute area under a ROC curve (AUROC) Probability of correct classification
Probability of incorrect classification Possible ways to evaluate performance • For various classification thresholds, plot • MultipleFAR and HIT rates (ROC curve) • Compute 1 - area under a ROC curve (1 -AUROC)
Problem • Database size • If the database is not of sufficient size, then results may not estimate or predict performance on a larger population of people. 1 - AUROC
Our Goal • To estimate and predict identification performance with a small number subjects 1 - AUROC
Our Solution • Derive two parametric measures • Expected Confusion (EC) • Transformed Expected-Confusion (EC*)
Our Solution • Derive two parametric measures • Expected Confusion (EC) • Transformed Expected-Confusion (EC*) Probability that an imposter’s feature vector is within the measurement variation of a target’s template
Our Solution • Derive two parametric measures • Expected Confusion (EC) • Transformed Expected-Confusion (EC*) Probability that an imposter’s feature vector is closer to a target’s template, than the target’s feature vector
Our Solution • Derive two parametric measures • Expected Confusion (EC) • Transformed Expected-Confusion (EC*) EC* = 1 - AUROC
Target Imposters Probe x Gallery For template - 1D Feature Space - Expected Confusion • Probability that an imposter’s feature vector is within the measurement variation of a target’s template
Expected Confusion - Uniform • The templates of the n individuals, are from an uniform density • Pp(x) = 1/n P(x) Pp(x) 1/n x - 1D Feature Space -
Expected Confusion - Uniform • The measurement variation of a template is also uniform • Pi(x) = 1/m P(x) Pi(x) 1/m Pp(x) 1/n x - 1D Feature Space -
Expected Confusion - Uniform • The probability that an imposter’s feature vector is within the measurement variation of template q3 is the area of overlap • True if m << n P(x) Pi(x) 1/m Pp(x) 1/n x - 1D Feature Space -
Expected Confusion - Uniform • The probability that an imposter’s feature vector is within the measurement variation of any template q • True if m << n P(x) Pi(x) 1/m Pp(x) 1/n x
: Population density : Measurement variation Expected Confusion - Gaussian • Following the same analysis, for the multidimensional Gaussian case
Expected Confusion - Gaussian • Following the same analysis, for the multidimensional Gaussian case • True if the measurement variation is significantly less then the population variation Probability that an imposter’s feature vector is within the measurement variation of a target’s template
Expected Confusion - Gaussian • Relationship to other metrics • Mutual Information • The negative natural log of the EC is the mutual information of two Gaussian densities
Target Imposters Probe x Gallery For template - 1D Feature Space - Transformed Expected-Confusion • Probability that an imposter’s feature vector is closer to a target’s template, than the target’s feature vector
Target Imposters x k For template Transformed Expected-Confusion • First: We find the probability that a target’s feature vector is some distance k away from its template
Target Imposters x k For template Transformed Expected-Confusion • Second: We find the probability that an imposter’s feature vector is less than or equal to that distance k
x Transformed Expected-Confusion • Therefore: The probability that an imposter’s feature is closer to the target’s template, than the target’s feature (for a distance k) is Target Imposters k
x Transformed Expected-Confusion • Therefore: The probability that an imposter’s feature is closer to the target’s template, than the target’s feature (for any distance k) is Target Imposters k
Transformed Expected-Confusion • Therefore: The expected value of this probability over all target’s templates is x
Transformed Expected-Confusion • Next: Replace the density of the distance between a target’s feature-vectors and its template q
Transformed Expected-Confusion • Answer: Probability that an imposter’s feature vector is closer to a target’s template, than the target’s feature vector
Transformed Expected-Confusion • This probability can be shown to be one minus the area under a ROC curve • Following the analysis of Green and Swets (1966)
Transformed Expected-Confusion • Integrate: With these assumptions
Transformed Expected-Confusion • Integrate: With these assumptions
Transformed Expected-Confusion • Integrate: With these assumptions
Transformed Expected-Confusion • Integrate: With these assumptions
Transformed Expected-Confusion • Integrate: Probability that an imposter’s feature vector is closer to a target’s template, than the target’s feature vector
Transformed Expected-Confusion • Compare: EC* with 1 - AUROC EC* = 1 - AUROC
Conclusion • Derive two parametric measures • Expected Confusion (EC) • Transformed Expected-Confusion (EC*) Probability that an imposter’s feature vector is closer to a target’s template, than the target’s feature vector
Conclusion • Derive two parametric measures • Expected Confusion (EC) • Transformed Expected-Confusion (EC*) Probability that an imposter’s feature vector is within the measurement variation of a target’s template Probability that an imposter’s feature vector is closer to a target’s template, than the target’s feature vector
Conclusion • Derive two parametric measures • Expected Confusion (EC) • Transformed Expected-Confusion (EC*) Probability that an imposter’s feature vector is within the measurement variation of a target’s template Probability that an imposter’s feature vector is closer to a target’s template, than the target’s feature vector
Future Work • Developing a mathematical model of the cumulative match characteristic (CMC) curve • Benefit: To predict how the CMC curve changes as more subjects are added