Advanced Techniques in Time Series Matching Using Turn Angle Functions and Landmark Sequences
260 likes | 396 Vues
This presentation introduces innovative approaches to time series matching through the use of turn angle functions and landmark sequences. By analyzing a dataset of 1400 images classified into 70 categories, we demonstrate how modified tangent space representations enhance shape description and distance calculation methods. We detail the process of landmark sequence matching, addressing the alignment of peaks and valleys, and incorporating penalty distances for unmatched features. The promising results indicate potential for improved retrieval rates and applicability in broader datasets.

Advanced Techniques in Time Series Matching Using Turn Angle Functions and Landmark Sequences
E N D
Presentation Transcript
Turn angle function and elastic time series matching Presented by: Wang , Xinzhen Advisor: Dr. Longin Jan Latecki
Agenda • Introduction • Turn angle function • Time series matching • Conclusion • Future work
Introduction • Data set: 1400 images (70 classes * 20 objects) Data Preprocessing 1400 land mark sequences
Introduction An example: Original image Landmark sequence Time series
Introduction • Time sequence matching Shape Matching Sequence Matching
Introduction • Problem definition: Given a query q and a distance function d, find m nearest neighbors of q by calculating the distance using d. In our case, m is equal to 40. Distance function d: a = (x1 ,x2 , ...xn) b = (y1 ,y2 , ...yn)
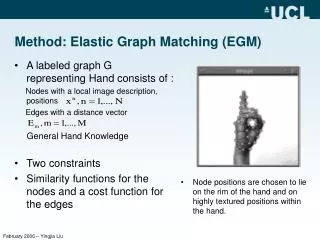
Tangent space representation • Shape description in tangent space Problem Step function presentation Simplified contour
Turn angle function • Modification to tangent space rep. Rotation (turning angle) Scaling (normalization) Starting point (double length)
Landmark sequence • From time series to land mark sequences Step I : compare each point with its left neighbor Step II : compare each point with its left and right neighbors • Disadvantages (ex: loss of information)
Landmark sequence matching • Step I : Align the highest peak of the query with every peak of the object, and then align other peaks and valleys of the query accordingly. • Step II: Calculate the Euclidean distance between the peaks/valleys of query and object. As we move query along the object, we have Euclidean distance for each alignment. A smallest Euclidean distance identifies the optimized alignment. • Step III: In the optimized alignment, we introduce a penalty distance if either query or object has extra peaks or valleys.
Landmark sequence matching An example: Aligning query peaks and valleys with object (one optimized alignment) Query’s peaks and valleys Object sequence (doubled)
Landmark sequence matching Another example : query has extra peaks and valleys Back
Landmark sequence matching • Penalty distance if the query has extra peaks/valleys, a penalty distance is added to the Euclidean distance between the query and object. The penalty distance is calculated by the sum of Euclidean distances between the unmatched peaks/valleys to the closest matched peaks/valleys in the query. See example If instead the object has extra peaks/valleys, a penalty distance is calculated by the sum of Euclidean distances between the unmatched peaks/valleys to the closest matched peaks/valleys in the object.
Some experimental results • Query: The first object in the 1st class • Search for 40 nearest neighbors in the whole dataset. • The top 40 matches found. • Retrieval Rate : 100%
Definition Retrieval Rate: Since we have the prior knowledge about those objects within the same class as the query object, we can define the retrieval rate of matching as : RetrievalRate = N / 20 ( N: number of objects in the top 40 matches that belong to the same class as the query object)
Part Matching--- In a primitive stage • We manually select a significant part of an object, for example the leaves of an apple, and proceed sub-sequence matching and retrieval • Since our query part has only three peaks and three valleys, we define them as LeftMostPeak/Valley, MiddlePeak/Valley, RightMostPeak/Valley. See here.
LeftMostPeak/Valley RightMostPeak/Valley MiddlePeak/Valley Back
Part Matching • The Matching Scope in object The closest peak/valley to the LeftMostPeak/Valley The closest peak/valley to the LeftMostPeak/Valley
Part Matching • Step I : Calculate the Euclidean distance between the peaks/valleys of the query part and object part. Only peaks/valleys fall between the matching scope in the object are considered for matching. • Step II: As we move query part along the object, we have Euclidean distance for each alignment. A smallest Euclidean distance identifies the optimized alignment. • Step III: In the optimized alignment, we introduce a penalty distance if either query part or object part has extra peaks or valleys. The penalty distance calculation would be the same as previous defined.
Some experimental results • Query part: The first object in the 1st class • Search for 40 nearest neighbors in the whole dataset. • Retrieval Rate : 60% • False positives
False Positives Come pretty early in the 40 matches! Obj626
False Positives Looks like the leaf of an apple?
Conclusion • It’s feasible to transform image contour data to time sequence. • Landmark sequence can capture the important features of time series. Matching based on it is applicable and promising. • Part Matching brings good result by submitting very limited query information.
Future work • Order of Matching (Eliminate crossover) • Combination of global matching with part matching. • Apply the technique on the whole dataset.