Active Microwave and LIDAR
Active Microwave and LIDAR. Three models for remote sensing.

Active Microwave and LIDAR
E N D
Presentation Transcript
Three models for remote sensing • 1. Passive-Reflective: Sensors that rely on EM energy emitted by the sun to illuminate the target. The sensor measures the amount of energy that is reflected from the target. Used for wavelengths of about 0.4-3.0 μm. Most of our work this quarter will focus on the use of this model. We will spend some time discussing two other models…
Three models for remote sensing • 2. Passive-Emitted: The sun still serves as the source of illumination (hence, still a passive system). The sensors measure the amount of EM energy emitted from the target in the thermal or emissive portion of the spectrum. These systems are intended to determine something about the thermal properties of the target. Used for wavelengths of about 3.0-30 μm
Three models for remote sensing • 3. Active: These systems do not rely on solar radiation to illuminate the target. The system emits EM energy and then records the amount of this energy that is reflected from the target. These systems operate in parts of the spectrum where emissions from the sun are minimal (longer wavelengths; microwave, radar). Usually for wavelengths of about 1cm-1m; some applications (LIDAR) at about 1 μm
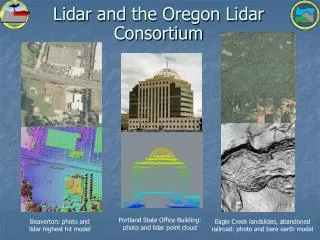
Active Systems • Active Microwave: wavelengths of about 1mm to 1m; RADAR (Radio Detection and Ranging • Capable of obtaining imagery day and night and can penetrate clouds • Certain wavelengths can penetrate some types of vegetation • Long wavelengths can penetrate dry soil (or sand) several meters to reveal subsurface features • Not as widely used as optical systems • LIDAR: (Light Detection and Ranging) wavelengths of about 1 µm; sometimes called LADAR (Laser Detection and Ranging) • Gaining widespread use in recent years
LIDAR • Pulses of energy (usually at about 1 µm) emitted from a laser, energy is reflected from the ground back to the sensor, travel time for the signal is used to measure distance from sensor to the ground feature • Inertial measurement unit (IMU) and GPS are critical for accurately locating ground footprint of laser pulses • Your text mentions continuous wave lasers and pulsed laser. My discussion will focus on use of the pulsed laser.
LIDAR: Laser Altimeter • First applications of LIDAR were to provide height above the ground for aircraft • Extension of this idea and improved aircraft navigation tools (IMU and GPS) made it possible to generate topographic maps • Use of laser footprints of about 10m over forests revealed multiple returns – several “heights.” Why? • Laser energy reflecting off different layers in the canopy; potential to obtain data about the vertical distribution of biomass in a forest canopy!
Airborne LIDAR • Ground footprint: 0.5m (or less) to 10m • Ground spacing of pulses: variable, generally 3-5m, sometimes <1m • Horizontal and vertical accuracy in the range of 0.5m or less
Waveform Recording vs. Discrete-return LIDAR Lefsky et al., Fig 1
Canopy height Lefsky et al., Fig 2
Synthetic Waveform created from discrete-return data Lefsky et al., Fig 4
Beach Erosion Application Beach profile before and after a major storm Lefsky et al., Fig 5