UAV PROJECT
UAV PROJECT. UAV TEAM. John C Plank Michael Midkiff Kenneth Jermstad Ethan Pratt Ignacio Santos.

UAV PROJECT
E N D
Presentation Transcript
UAV TEAM John C Plank Michael Midkiff Kenneth Jermstad Ethan Pratt Ignacio Santos
UAV HISTORYEarly stages of WWI B-17 in WWIIRadioplane Falconer 19501960’s and 1970’s : AQ-34, Northrop Chukar1980’s: NASA Pathfinder 1990’s: Endurance tests2000’s and beyond: Micro and Nano size
MethodsAVLHand analysisSimulation software Design with Inventor
AVL and Tornado Programs • Calculate in-flight parameters to analyze performance. • Vortex lattices array for lifting surfaces. • Lift coefficient. Induced drag coefficient. • Geometry - X, Y, Z coordinates of leading edge. - Chord length.
Airfoil UIUC Airfoil database. Found usa 51 match. • Mass and Inertia breakdown Weight distribution. Center of gravity. Bilxer usa 51
Results • Zero lift angle: -5.3447˚ • Real range of flight: -5˚ to 12˚.
Parasitic Drag Estimates • Parasitic Drag Coefficient • Skin Friction Coefficient
Gliding Flight • Range • Endurance
Battery Powered Flight (Cont.) • Max Rate of Climb • Velocity for Max Rate of Climb
RC and Autonomous Flight Setup Plane Layout • 4 servos and a single brushless motor • 2 servos controlling right and left Ailerons • 1 servo controlling Elevator • 1 servo controlling Rudder • RC Receiver and Transmitter • ArduPilot Mega 2.5 with GPS Module • ESC (Electronic Speed Controller) • Power Module and Battery
Transmitter and Receiver • Transmitter • Sends Signals from the movements of 2-axis joysticks that have been programmed to correspond to each one of the 4 channels (R&L Ailerons, Elevator, Rudder, Throttle) • Also has a 5th channel programmed to be a toggle switch between flight modes • Receiver • Receives signal from the transmitter and outputs to each channel causing servos to rotate, throttle to increase etc.
ArduPilot Mega • ArduPilot Mega is an Arduino based autopilot system • ArduPilot features various things such as 3-axis gyros and GPS • Acts as a bridge between receiver and output to servos and motor • Can be configured to run various flight modes including Manual flight or Autopilot by use of a toggle switch on the transmitter • All settings for ArduPilot are configured using the free Mission Planner software.
ArduPilot Setup Through Mission Planner • ArduPilot is configured via Mission Planner freeware • From Mission Planner Flight modes can be set (Manual, Auto, Stabalize, RTL) • Transmitter and servos can be calibrated • GPS coordinates can be input for autonomous flight waypoints once in Auto mode
Flight Simulation Mission Planner also includes the ability to run flight simulations through X-Plane Choice of simulating virtually or with servos and motor running by connecting battery Simulation is controlled with transmitter by using ArduPilot outputs as flight simulator controls This is being used to gain experience with flying an RC plane in order to have successful live test flights without damage
Inventor Analysis and Design • Electronic Components
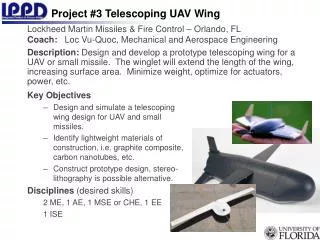
Boom and Pod Sailplane • Pod – to hold electronic components • Boom – connects tail to body • Low drag • High stability