Real-Time Path Planning Guidance (RT-PPG) for Enhanced Target Presentation Management
The Real-Time Path Planning Guidance (RT-PPG) project aims to develop an API that enables the safe generation of flight profiles in real-time. By integrating AI with high-resolution environmental data, the RT-PPG reduces man-hours and RCO workload while increasing mission flexibility. This innovative system allows users to define target presentation parameters through simple interactions, enhancing decision-making capabilities. The project will showcase a new algorithm to automatically generate optimal flight paths based on multiple constraints, streamlining operations and improving safety.

Real-Time Path Planning Guidance (RT-PPG) for Enhanced Target Presentation Management
E N D
Presentation Transcript
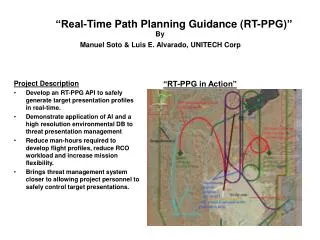
“Real-Time Path Planning Guidance (RT-PPG)”By Manuel Soto & Luis E. Alvarado, UNITECH Corp Project Description • Develop an RT-PPG API to safely generate target presentation profiles in real-time. • Demonstrate application of AI and a high resolution environmental DB to threat presentation management • Reduce man-hours required to develop flight profiles, reduce RCO workload and increase mission flexibility. • Brings threat management system closer to allowing project personnel to safely control target presentations. “RT-PPG in Action”
Briefing Outline “Real Time Path Planning Guidance” • Problem Statement • Project Description • Technical Approach • Weighted A* • Status • RT-PPG Test Bed • Questions
Problem Statement • The Guidance Algorithms presently used by DOD target control systems utilize flight patterns (FP) composed of circular arc segments and straight segments. These FP must be created prior to the mission. Present target control systems have the capability to translate and rotate these patterns in real time, however changing the geometry and symmetry of these patterns is a very cumbersome process that cannot be safely done in real time. • The DOD target control systems do not have the capability to automatically generate flight patterns based on target obscuration requirements. These target trajectories are presently designed manually using available terrain elevation data. • This presentation recommends the demonstration of a new Real-Time Path Planning Algorithm that will help the mission operators to safelygenerate flight pattern profiles in real time by simply using the computer mouse or a touch screen monitor to select recommended target way points and to define target presentation parameters.
Project Description • Automatically select the best path given a starting point and the goal. The best path decision will be based on a cost function that will include time of arrival, terrain information, aircraft velocity profile, no fly zone areas such as range boundaries and optical sites and target obscuration requirements. The RT-PPG may also decide to put the aircraft into a loitering pattern before it begins its journey to its final destination point. • The RT-PPG will be an Application Program Interface, POSIX compliant, (portable to LINUX, AIX, SOLARIS, WINDOWS, etc), with a properly documented Interface. • The RT-PPG will co-exits with legacy guidance algorithms including DRAPE. • The user will have the capability to change the cost function in real time based on desired mission objectives (i.e. desired target altitude above ground level, target obscuration requirements and target time-of-arrival to destination point) • The user will have the capability to select any number of points between the starting point and the final aircraft destination.
Project Description (cont) • The RT-PPG will warn/override the operator if the operator provides destination points that do not make sense or will put the safety of the aircraft in jeopardy. • The selected path will be converted to a flight profile in real time. The operator shall have the capability to delete unwanted patterns and re-generate any other pattern in real time. The flight profiles will not be activated until the operator confirms that the patterns can now be used to guide the target. • The pattern altitude may depend on target obscuration requirements. • The RT-PPG could also be used to generate flight patterns in off-line mode prior to the actual mission. The generated patterns can also be saved into files and retrieved at any point in time per user request.
Technical Approach • Use weighted A* algorithm to determine best path based on terrain elevation data, desired time of arrival and target obscuration requirements. • Use splines constructed of straight segments and variable radius arc segments to develop flyable paths. • Make flight profile data available to current DFCS guidance and control software. • Use current DFCS guidance algorithms (i.e. cross track, synch, along track, DRAPE) to fly target on RT-PPG generated flight profile. • Display generated flight profiles on DFCS console subsystem.
Weighted A* A* follows the lowest energy path
Status • Developed PC based Test Bed to evaluate A* RT-PPG algorithm, including: • WSMR 30 meter resolution elevation data • Weighted A* Algorithm • Flight Pattern Generator • Graphical user interface • UDP Interface to DFCS
RT-PPG Test Bed A* Path generation over WSMR using computer mouse
Response to Questions • QUESTIONS ?