Download
1 / 23
230 likes | 253 Vues
This project aims to develop integrated control, planning, and sensing capabilities for multi-limbed robots to climb steep natural terrain. The focus is on generic versus specific robot approaches, with the LEMUR IIb from NASA-JPL being a specific example. The project explores the natural friction and non-gaited motion involved in free rock climbing, treating it as a problem-solving activity. Motion planning techniques are employed to ensure feasibility, equilibrium, collision avoidance, and torque limits. Ongoing work includes terrain sensing, force control, uncertainty management, and motion optimization.

E N D
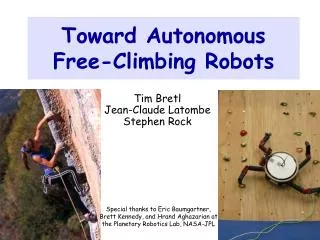
Toward AutonomousFree-Climbing Robots Tim Bretl Jean-Claude Latombe Stephen Rock Special thanks to Eric Baumgartner, Brett Kennedy, and Hrand Aghazarian at the Planetary Robotics Lab, NASA-JPL
Goal Develop integrated control, planning, and sensing capabilities to enable a wide class of multi-limbed robots to climb steep natural terrain.
Generic vs. Specific Robot Generic Specific LEMUR IIb, Planetary Robotics Lab, NASA-JPL Sitti and Fearing, UC Berkeley
Previous Multi-Limbed Climbing Robots Each exploits a specific surface property Neubauer, 1994 NINJA II Hirose et al, 1991 Yim, PARC, 2002
… and Non-Gaited Motion Non-Gaited Gaited
Overall, rock climbing is about how to apply strength, not about strength itself it is a problem-solving activity
Equilibrium Constraint Feasible positions of robot’s center of mass
Configuration Space For each combination of knee bends: • Position (xP,yP) of pelvis • Joint angles (q1,q2) of free limb
p q2 -p q1 p -p Feasible Space
Feasible Space Simple test for the feasibility of (xp,yp) where…
Feasible Space Simple test for the feasibility of (xp,yp) Feasible (1,2) varying with (xp,yp), in one half of f Qf where…
Feasible Space Simple test for the feasibility of (xp,yp) Feasible (1,2), varying with (xp,yp), in one half of f Switching between halves of f
Motion Planning • Basic Approach (Probabilistic Roadmap) • Sample 4D configuration space • Check equilibrium condition • Check (self-)collision • Check torque limit • Refined approach • Sample 2D pelvis space, lift to full 4D paths • Narrow passages are found in the 4D space
Achieve q2=0 • Move with q2=0 • Switch between halves of Qf • Move with q2=0 • Move to goal
backstep highstep lieback
Current Work • Terrain sensing and hold detection • Force control and slippage sensing • Uncertainty (hold location, limb positioning) • Motion optimization • Extension of feasible space analysis
What’s Next? Xtreme ironing ? >>> X
Xtreme ironing is one of the fastest-growingsports in the world