Download

1 / 21
210 likes | 301 Vues
Explore the development of integrated control, planning, and sensing capabilities to enable multi-limbed robots on natural terrain. Learn about equilibrium, hold definitions, feasible spaces, motion planning, and algorithms for climbing robots.

E N D
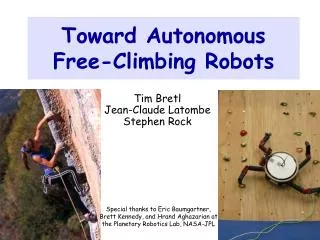
Toward AutonomousFree-Climbing Robots Tim Bretl Jean-Claude Latombe Stephen Rock CS 326 Presentation Winter 2004 Christopher Allocco Special thanks to Eric Baumgartner, Brett Kennedy, and Hrand Aghazarian at the Planetary Robotics Lab, NASA-JPL
Goal Develop integrated control, planning, and sensing capabilities to enable a wide class of multi-limbed robots to climb steep natural terrain.
Previous Multi-Limbed Climbing Robots Each exploits a specific surface property Neubauer, 1994 NINJA II Hirose et al, 1991 Yim, PARC, 2002
Non-Gaited Motion Non-Gaited Gaited Non-Gaited Motion implies one-step approach
One-Step-Climbing Problem Given a start configurationof the robot and a hold, compute a path connecting the start configuration to a configuration that places the foot of the free limb at the hold such that the robot remains in equilibrium along the entire path.
Hold Hold A hold is defined by a point (xi,yi) and a direction vi . The reaction force that the hold may exert on the foot spans a cone Fci—the friction cone at i—of half angle less than or equal to pi/2.
Equilibrium Equilibrium For the robot to be in equilibrium, there must exist reaction forces at the supporting holds whose sum exactly compensates for the gravitational force on the robot.
Configuration Space For each combination of knee bends: • Position (xP,yP) of pelvis • Joint angles (q1,q2) of free limb
p q2 -p q1 p -p Feasible Space
Feasible Space Simple test for the feasibility of (xp,yp) where…
Feasible Space Simple test for the feasibility of (xp,yp) Feasible (1,2) varying with (xp,yp), in one half of f Qf where…
Feasible Space Simple test for the feasibility of (xp,yp) Feasible (1,2), varying with (xp,yp), in one half of f Switching between halves of f
Motion Planning • Basic Approach (Probabilistic Roadmap) • Sample 4D configuration space • Check equilibrium condition • Check (self-)collision • Check torque limit • Refined approach • Sample 2D pelvis space, lift to full 4D paths • Narrow passages are found in the 4D space • Does not scale directly to handle DOFs > 2 or constraints such as collision avoidance, joint limits
Basic Algorithm Algorithm 1 One-Step-Climbing1. V {}, E {}2. If qs satisfies the equilibrium test, then add qs to V , else exit with failure.3. (Sample the goal region) Loop N1 times:(a) Sample uniformly at random a combination of knee bends of the contact chain and a pelvis position(xp, yp) within distance 2L from each of the three holds i, k, and g.(b) For each of the corresponding two configurations q where the foot of the free limb is at g, if q satisfiesthe equilibrium test, then add q to V .4. If no vertex was added to V at Step 3, then exit with failure.5. (Sample the feasible space) Loop N2 times:(a) Sample uniformly at random a configuration q 2 Fik. If it satisfies the equilibrium test, then add q to V .(b) For every configuration q0 previously in V that is closer to q than some predefined distance, if the linearpath joining q and q0 satisfies the equilibrium test, then add this path to E.(c) If the connected component containing qs also contains a configuration sampled at Step 3 (goal configuration),then exit with a path.6. Exit with failure.
Refined Algorithm • Achieve q2=0 • Move with q2=0 • Switch between halves of Qf • Move with q2=0 • Move to goal
backstep highstep lieback
3-D Four-Limbed Robot 1. The joint limits are such that the inverse kinematics of each limb has at most one solution. Therefore, no decomposition of Cik according to knee bends is needed. 2. Sampling configurations of the contact chain is much harder than in the planar case. 3. The equilibrium test of Section 3.3 is modified since there are three supporting limbs. The friction cone becomes an n-gonal pyramid. 4. Check for both self-collision of the robot and collision with the environment.
Current Work • Terrain sensing and hold detection • Force control and slippage sensing • Uncertainty (hold location, limb positioning) • Motion optimization • Extension of feasible space analysis