Wandering Ambassador
This project focuses on developing a robot that enhances the care of plants while demonstrating RIT's commitment to sustainability and innovation. The robot is designed to form a symbiotic relationship with plants by addressing their needs (sunlight and water) and adapting its actions accordingly. Key objectives include debugging I2C communication, integrating sensor circuitry, implementing safety features, and creating a full prototype ready for software development. The robot utilizes advanced decision-making logic and upgraded platforms to optimize performance in plant maintenance.

Wandering Ambassador
E N D
Presentation Transcript
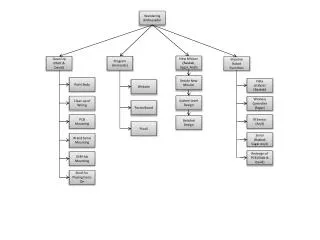
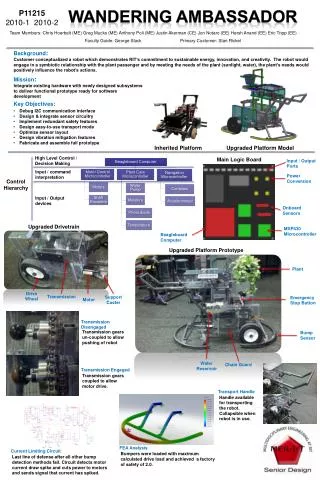
Wandering Ambassador P11215 2010-1 2010-2 Team Members: Chris Hoerbelt (ME) Greg Mucks (ME) Anthony Poli (ME) Justin Akerman (CE) Jon Notaro (EE) HershAnand (EE) Eric Tripp (EE) Faculty Guide: George Slack Primary Customer: Stan Rickel Background: Customer conceptualized a robot which demonstrates RIT’s commitment to sustainable energy, innovation, and creativity. The robot would engage in a symbiotic relationship with the plant passenger and by meeting the needs of the plant (sunlight, water), the plant’s needs would positively influence the robot’s actions. Mission: Integrate existing hardware with newly designed subsystems to deliver functional prototype ready for software development Key Objectives: • Debug I2C communication interface • Design & integrate sensor circuitry • Implement redundant safety features • Design easy-to-use transport mode • Optimize sensor layout • Design vibration mitigation features • Fabricate and assemble full prototype Inherited Platform Upgraded Platform Model High Level Control / Decision Making Main Logic Board Input / Output Ports Input / command interpretation Power Conversion Control Hierarchy Input / Output devices Onboard Sensors Upgraded Drivetrain MSP430 Microcontroller Beagleboard Computer Upgraded Platform Prototype Plant Drive Wheel Transmission Support Caster Emergency Stop Button Motor Transmission Disengaged Transmission gears un-coupled to allow pushing of robot Bump Sensor Water Reservoir Chain Guard Transmission Engaged Transmission gears coupled to allow motor drive. Transport Handle Handle available for transporting the robot. Collapsible when robot is in use. FEA Analysis Current Limiting Circuit Bumpers were loaded with maximum calculated drive load and achieved a factory of safety of 2.0. Last line of defense after all other bump detection methods fail. Circuit detects motor current draw spike and cuts power to motors and sends signal that current has spiked.