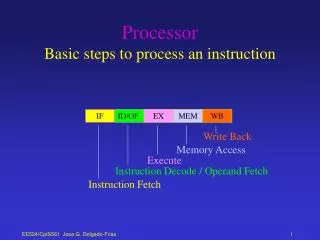
Basic Instruction Cycle
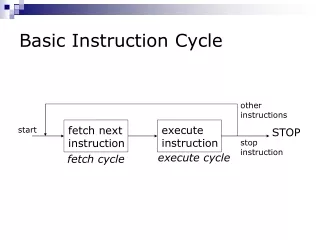
Basic Instruction Cycle. other instructions. execute instruction. fetch next instruction. start. STOP. stop instruction. execute cycle. fetch cycle. Instruction Cycle with Interrupts. If interrupts disabled. fetch next instruction. execute instruction. STOP. start.

Basic Instruction Cycle
E N D
Presentation Transcript
Basic Instruction Cycle other instructions execute instruction fetch next instruction start STOP stop instruction execute cycle fetch cycle
Instruction Cycle with Interrupts If interrupts disabled fetch next instruction execute instruction STOP start stop instruction execute cycle fetch cycle If interrupts enabled NO interrupt? executeinterrupt sequence YES
Interrupt Sequence (review) • save a copy of status register; (SRcopy) ← (SR) • set supervisor mode on (S=1 on SR) • set trace off (T=0 on SR) • determine vector number • save PC on supervisor stack • save SRcopy on supervisor stack • vector address = vector number * 4 • (PC) ← (vector address)
Interrupt Vector … vector 0 vector 0 = reset (hard reset) • 2 longwords in vector table => no vector 1 (unlike all other vectors which are 1 longword) • typically in ROM or supervisor program space • used to load the system or do system recovery • interrupt sequence is different from normal: • Interrupt mask on SR, I2I1I0← 111 (highest priority interrupt) • don’t save SR or PC, can’t be trusted • ISR is actually the power up or restart code
Interrupt Vector … vectors 2, 3 Function code: 001 user data010 user program101 supervisor data110 supervisor program Vectors: 2 = bus error, 3 = address error !! puts additional information on stack to allow debugging * Instruction = normal instructions, TRAP, TRAPV, CHK, zero divide exception
Interrupt Vector … vectors 2, 3 0000 ORG $8000 create an 8000 307C 3001 MOVE.W #$3001,A0 illegal addr 8004 3010 MOVE.W (A0),D0 and access 8006 END e.g. Tutor(unix like IDE) TUTOR 1.32 > T PHYSICAL ADDRESS=00008000 3015 00003001 3010 ADDR TRAP ERROR … register dump e.g. EASy68K (current IDE) Address Error: Instruction at 8004 accessing address 3001 Execution halted
Interrupt Vector … vectors 4-8 vectors 4-8 = programming errors or intentional error handling routines • either put out error message ortry to handle (compensate for error)
Interrupt Vector … vector 5 ORG $__ ; init vector address DC.L ZDIV ; for zero divide ORG $1000 START … CLR.L D0 ; force divide by zero DIVU D0,D1 ; D1/D0 … STOP #$2700 ZDIV LEA Z_ERR,A1 ; addr of error msg MOVEQ #13,D0 ; task: print string TRAP #15 ; call monitor STOP #$2700 ; halt system Z_ERR DC.B 'System halting: divide by zero',0 END START
Interrupt Vector … vector 6 CHK instruction (in reference manual) = CHK <ea>,Dn • check register against bounds: if Dn < 0 or Dn > upper bound then CHK instruction trap (out of bounds)end if • typically, used to check array index (Dn) against array bounds MOVE.W INDEX,D1 CHK #max_size,D1
Interrupt Vector … vector 7 TRAPV instruction (in ref manual) = TRAPV • trap on signed overflow if V then TRAPV exceptionend if • placed immediately after an arithmetic instruction ADD.L D0,D1 ; add numbers TRAPV ; check for overflow MOVE.L D1,NUM ; store result NOT the same as TRAP !!
Interrupt Vector … vector 9 vector 9 = trace • if trace requested in development environment, T flag set in Status Register • after an instruction has finished executing, system checks the T flag • if T=1, then execute the trace service routine • what does the trace routine do? • for command line systems, dump the registers • for EASy68K, dump PC, IR, instruction opcodee.g. PC=$00001004 CODE=$3010 MOVEW
Interrupt Vector … vectors 10,11 vector 10 = Aline (Line 1010) Emulator vector 11 = Fline (Line 1111) Emulator • allows user to define their own instructions • machine code starts with $A or $F • How would you call these?33C0 00002000 move.w D0,numA0002029 00002002 move.l index,A0
Interrupt Vector … vectors 24-31 vector 24 = spurious interrupt • no device responds during an interrupt acknowledge cycle (a special class of bus error) vectors 25-31 = 7 hardware interrupts • IPL2, IPL1, IPL0 pins on the 68000 chip • edge triggered; active low signals • pin combination indicates priority level • 000 no interrupt • 001 lowest priority interrupt • … • 111 highest priority interrupt; a "nonmaskable interrupt" • An interrupt request is made to the processor by encoding the interrupt request levels 1–7 on the three interrupt pins.
Interrupt Vector … vectors 32-47 vector 32-47 = TRAP • used to request service from operating system • Traps numbered 0 to 15 • how do you pass parameters to trap • in registers • on stack • what if you have more than 16 functions?
Interrupt Vector … vector 32 ORG $___ DC.L CLR_REG ;init address vector for Trap 0 ORG $1000 START … TRAP #0 ; clear registers … STOP #$2700 CLR_REG LEA R2Z,A1 ; point to zero data area MOVE.W #15-1,D0 ; adjust cnt for 15 registers REG_LP MOVE.L #0,(A1)+ ; zero the data area DBRA D0,REG_LP MOVEM.L R2Z,D0-D7/A0-A6 ; zero the registers RTE R2Z DS.L 15 END START
Priority of Interrupts Group 0 = highest priority group - currently executing instruction aborted- stack contents have additional information- in decreasing priority: -> reset-> bus error-> address error Group 1- exception processed at completion of currently executing instruction- in decreasing priority:-> trace (if no other exception happening)-> autovectored interrupts: priority 7 down to 1; other hardware interrupts-> illegal instruction-> privilege violation Group 2 = exception processed by executing instruction-> TRAP, TRAPV, CHK, Zero divide
Sequential Interrupt Processing Nested Interrupt Processing Multiple Interrupts
Printer -> priority 2 generates an interrupt every time it completes a print operation Communication Unit -> priority 5 generates an interrupt every time a unit of data arrives Disk -> priority 4 generates an interrupt when data must be handled Multiple Interrupts User program Printer ISR Comm ISR X Disk Disk ISR
Reading/Expectations Reading: • Section 6 - Exception Processing from M68000 8-/16-/32-Bit Microprocessors User’s Manual [pdf, 184 p; Motorola] Expectations: • you are responsible for all material in the above section, excluding references to M68010 • you should be able to write interrupt service routines for any vector including determining the vector address • you should be able to determine the order of interrupts based on priority and time of arrival for a multiple interrupt system