Enhancing Mobile Robot Learning through Human Knowledge Integration and Adaptive Navigation
This project focuses on developing intelligent adaptive mobile robots that utilize human-supplied knowledge to enhance their learning and decision-making capabilities. By employing continuous reframing to tackle complex problems, these robots will achieve robustness through explicit uncertainty modeling and proactive information gathering. Key components include implementing an optical-flow-based obstacle avoidance system, amplifying human expertise, and integrating learning, planning, and navigation in multi-objective, uncertain environments. The overarching goal is to create agile robots capable of extended operations in complex domains.

Enhancing Mobile Robot Learning through Human Knowledge Integration and Adaptive Navigation
E N D
Presentation Transcript
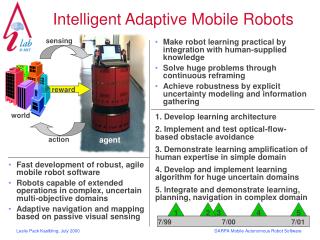
sensing reward world action agent Intelligent Adaptive Mobile Robots • Make robot learning practical by integration with human-supplied knowledge • Solve huge problems through continuous reframing • Achieve robustness by explicit uncertainty modeling and information gathering 1. Develop learning architecture 2. Implement and test optical-flow-based obstacle avoidance 3. Demonstrate learning amplification of human expertise in simple domain 4. Develop and implement learning algorithm for huge uncertain domains 5. Integrate and demonstrate learning, planning, navigation in complex domain • Fast development of robust, agile mobile robot software • Robots capable of extended operations in complex, uncertain multi-objective domains • Adaptive navigation and mapping based on passive visual sensing 1 2 3 4 5 7/99 7/00 7/01