Intelligent Adaptive Mobile Robots
This work explores the evolution of intelligent adaptive mobile robots, emphasizing practical robot learning through the integration of human knowledge. By addressing complex problems through continuous reframing, we achieve enhanced robustness via explicit uncertainty modeling and information gathering. Key milestones include breakthroughs in robot learning for hallway navigation, vision-based navigation in realistic simulations, and performing complex tasks in challenging environments. Our advancements enable mobile robots to operate effectively within uncertain multi-objective domains, ensuring agile and robust performance.


Intelligent Adaptive Mobile Robots
E N D
Presentation Transcript
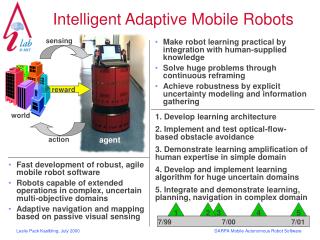
Intelligent Adaptive Mobile Robots • Make robot learning practical by integration with human-supplied knowledge • Solve huge problems through continuous reframing • Achieve robustness by explicit uncertainty modeling and information gathering world reward • Dec 1999. Robot learning more efficient than human programming alone for hallway navigation. • March 2000. Vision-based navigation in realistic simulation. • June 2000. Robot learning more efficient for complex robot task. • Dec 2000. Extended operation in highly complex surveillance and delivery domain. • Fast development of robust, agile mobile robot software • Robots capable of extended operations in complex, uncertain multi-objective domains