Download
1 / 9
110 likes | 290 Vues
ROBOTIC ARMS. Gateway Coalition - WSU Rahul K. Shah. FUNDAMENTALS. MECHANICAL MANIPULATOR Can perform a variety of tasks also called an industrial robot CONSTRUCTION & PARTS Non-moving Base/Frame Links position and orientation depends on the co-ordinate system Joints

E N D
ROBOTIC ARMS Gateway Coalition - WSU Rahul K. Shah
FUNDAMENTALS • MECHANICAL MANIPULATOR • Can perform a variety of tasks • also called an industrial robot • CONSTRUCTION & PARTS • Non-moving Base/Frame • Links • position and orientation depends on the co-ordinate system • Joints • allow motion of neighboring links • can be rotary, sliding or prismatic
FUNDAMENTALS • CONSTRUCTION & PARTS (contd.) • End-Effector • in our case it will be the Gripper • TERMINOLOGY • Workspace • area within the reach of a manipulator • Tool Frame • gives the position of the manipulator w.r.t the Base Frame
FUNDAMENTALS • TERMINOLOGY (contd.) • Jacobian • matrix quantity which helps with velocity analysis using Mapping • Joint Torques • These are to be calculated whenever there is a contact with another object or the need of applying a static force arises
FUNDAMENTALS • TYPES OF CONTROLS • Linear position control • Nonlinear position Control • Force Control • All of the above need to be programmed via a robot programming language.
SPECIFICATIONS • An example of standard specifications
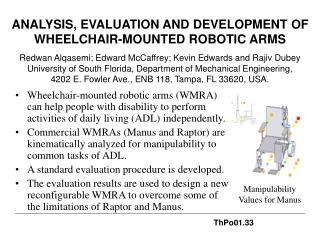
CONCERNS • Typical Weight to Payload ratio :- 12-26 • An arm this heavy is going to affect the performance of the wheelchair. • Size of links due to the size of motors. • Typically around 4 to 5 in.