Download
1 / 23
240 likes | 390 Vues
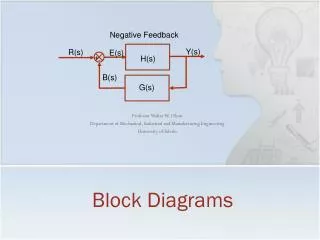
This guide provides an overview of block diagrams and transfer functions used in control systems. It explains crucial components, such as signals, gains, and summation through visual representations. Learn to construct and analyze systems using series and parallel configurations, feedback methods, and mathematical simplifications. The document also covers practical applications, including a quarter car suspension model, demonstrating how to derive overall transfer functions and step responses. Mastering these principles is essential for engineers and students in control theory.

E N D
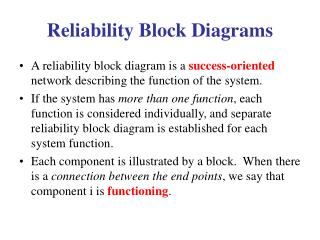
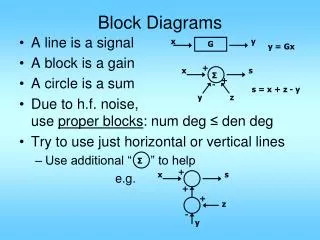
Block Diagrams x y G • A line is a signal • A block is a gain • A circle is a sum • Due to h.f. noise,use proper blocks: num deg ≤ den deg • Try to use just horizontal or vertical lines • Use additional “ ” to help e.g. y = Gx + x s Σ + - s = x + z - y y z Σ + x s + + z - y
Block Diagram Algebra x y • Series: • Parallel: G1 G2 x y G1 G2 G1 + x y x y G1 + G2 + G2
Feedback: • Proof: + e x x y G1 y - b G2
+ G1 + G2 + -
>> s=tf('s') Transfer function: s >> G1=(s+1)/(s+2) Transfer function: s + 1 ----- s + 2 >> G2=5/(s+5) Transfer function: 5 ----- s + 5 >> G=G1*G2 Transfer function: 5 s + 5 -------------- s^2 + 7 s + 10 >> H=G1+G2 Transfer function: s^2 + 11 s + 15 --------------- s^2 + 7 s + 10 >> HF=feedback(G1, G2) Transfer function: s^2 + 6 s + 5 --------------- s^2 + 12 s + 15
>> delay1=tf(1,1,'inputdelay',0.05) Transfer function: exp(-0.05*s) * 1 >> H2=HF*delay1 Transfer function: s^2 + 6 s + 5 exp(-0.05*s) * --------------- s^2 + 12 s + 15 >> stepresp=H2*1/s Transfer function: s^2 + 6 s + 5 exp(-0.05*s) * ------------------- s^3 + 12 s^2 + 15 s >> step(H2)
Quarter car suspension Series R(s) + y - R(s) + y Feedback - R(s) y
>> b=sym('b'); >> m=sym('m'); >> k=sym('k'); >> s=sym('s'); >> G1=b*s+k G1 = b*s+k >> G2=1/m*1/s*1/s G2 = 1/m/s^2 >> G=G1*G2 G = (b*s+k)/m/s^2 >> Gcl=G/(1+G) Gcl = (b*s+k)/m/s^2/(1+(b*s+k)/m/s^2) >> simplify(Gcl) ans = (b*s+k)/(m*s^2+b*s+k)
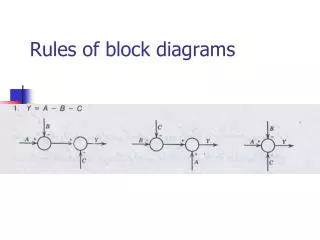
pick-up point summation • Move a block (G1) across a into all touching lines: • If arrow direction changes, invert • If arrow direction remains, no change in block • e.g. along arrow no change along arrow x y x y G1 G2 G1 G2 no change z G3 G1 along arrow along arrow z G3
x G1 G2 x G1 G2 y y z G3 z G3 1/G2 x G1 G3 1/G3 G2 x G1 G2 y y z z G3
I2 I1 - Vc U + y + - I2 - Vc U + y + - - U + y + -
- U + y - U + y U y
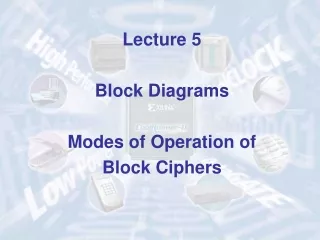
Find TF from U to Y: • No pure series/parallel/feedback • Needs to move a block, but which one? Key: move one block to create pure series or parallel or feedback! So move either left or right. + U + + Y + - -
+ U + + Y + - - + U + + Y + - - + U + Y + -
fig_03_16 fig_03_16 is wrong Should be H1(s)G2(s)
fig_03_17 fig_03_17 is wrong
fig_03_19 Can use superposition: First set D=0, find Y due to R Then set R=0, find Y due to D Finally, add the two component to get the overall Y
fig_03_20 First set D=0, find Y due to R
Then set R=0, find Y due to D fig_03_21 G2
Finally, add the two component to get the overall Y fig_03_19