Pose Invariant Palmprint Recognition
240 likes | 426 Vues
Pose Invariant Palmprint Recognition. Chhaya Methani and Anoop Namboodiri Centre for Visual Information Technology IIIT, Hyderabad, INDIA. Palmprint Aquisition. Controlled pose, scale, and illumination High accuracy. Fixed Scanner/Camera Restricted Palm position Palmprint -Specific.

Pose Invariant Palmprint Recognition
E N D
Presentation Transcript
Pose Invariant Palmprint Recognition Chhaya Methani and Anoop Namboodiri Centre for Visual Information Technology IIIT, Hyderabad, INDIA
Palmprint Aquisition • Controlled pose, scale, and illumination • High accuracy • Fixed Scanner/Camera • Restricted Palm position • Palmprint-Specific • Can we use a generic camera as the acquisition device?
Unrestricted Palmprint Imaging • Minimal Constraints • Intuitive, user friendly • New applications • Multibiometric sensor
Challenges • Background • Illumination • Contrast • Noise • Pose • Scale
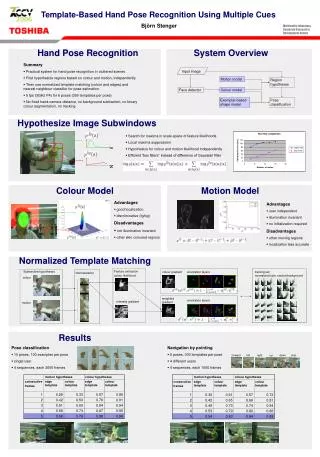
Previous Work • Background • Skin Color • Hand Shape • Illumination • Normalize • Noise Shadow,Wrinkles, Pixel Noise. • Good features • Scale Stenger et al. “Model-Based Hand Tracking Using a Hierarchical Bayesian Filter”, TPAMI 28(9), Sept. 2006 JDoublet, et al. “Contactless hand Recognition Using Shape and Texture Features”, ICSP 2006
Variations in Pose • Induce perspective line distortions • Associated with scale changes • Performance degradation EER: ~22% • Dataset: 100 palms, 5 images per palm. • Solution Directions: • Compute Pose-Invariant Features • Correct Pose variations • Non-rigid transformations are difficult to model • Assumption of planarity
Invariance to Perspective Projection • Cross Ratio, defined by 5 coplanar points • Assume a stretched out palm to be planar • Sensitive to point position • Need reliable point detection • Point matches found using SIFT • Zheng, Wang and Boult : “ Application of Projective Invariants in Hand Geometry Biometrics”, IEEE Transactions on Information Forensics and Security, 2007.
Finding Pose Transformation Parameters • Palm considered a planar surface. • Homography defines transformation parameters between 2 planes given 4 point correspondences are known. • Where x'/c and y'/c is the resulting point. • 4 distinctive point correspondences needed.
Solution using Interest Points • We use a combination of stable points and a set of interest points as candidate matches. • Stable/Valley points are the consistent points. • 4 valley points available. • Only 2 can be used. Valley Points • Rest of the points must be selected from the palm lines. • Thus, we choose a bag of candidate interest points. • These points are refined later to get reliable interest points.
Proposed Solution Image Acquisition Image Preprocessing & Palm Extraction Image Alignment Feature Extraction Matching
Image Acquisition • Fixed Camera and Background • Flexible Palm pose and position • Natural Illuminationvariations • Sample Image Image Acquisition Image Preprocessing & Palm Extraction Image Alignment Feature Extraction Matching
Image Preprocessing & Palm Extraction • Finger valley points are used to extract ROI and correct in-plane rotations Image Acquisition Image Preprocessing & Palm Extraction Image Alignment Feature Extraction Matching
Proposed Solution – Image Alignment • Assumption of planarity of the palm surface • Homography can be used to estimate pose • 4 distinct point correspondences needed. • Use a combination of stable points and interest points Valley Points • Other interest points? Back to the same problem! Image Acquisition Image Preprocessing & Palm Extraction Image Alignment Feature Extraction Matching
Proposed Solution – Image Alignment • Descriptors are made using 11x11 windows around each of the candidate interest points • Correspondences found using correlation • Similar process is followed for the second palm • Assuming equal probability of occurrence for all points on the line, a richly sampled point set is chosen on the palm line Image Acquisition Image Preprocessing & Palm Extraction Image Alignment Feature Extraction Matching
Proposed Solution – Image Alignment • Input to RANSAC based Homography: the 2 valley points and iterative selection of the other two from the interest points. • Final set of inliers in both the template and the set image. • The best set of parameters found by RANSAC are used for the final transformation. • The final transformed image. Image Acquisition Image Preprocessing & Palm Extraction Image Alignment Feature Extraction Matching
Proposed Solution: Computing Features and Matching • Thresholded Gabor responses • dist(final) = min(dist(fixed), dist(corrected)) • D. Zhang, A. W. K. Kong, You, J., Wong M., “Online Palmprint Identification” , PAMI 2003. Image Acquisition Image Preprocessing & Palm Extraction Image Alignment Feature Extraction Matching
Datasets • 100 palms, 5 images per palm • Pose variations up to 45 degrees • 50 palms, from PolyU dataset • 10 synthetic poses per palm: 0 - 45 degrees
Results • Comparison of EER values
Results • Semilog curve to observe the highlighted data. • (p) : GAR low even with high FAR. • Indicates genuine pairs with low similarity. • Reasons: Blur, wrinkles, etc. • (q) : There is a sharp drop in the GAR. • Indicates imposter pairs with high similarity. • Reasons: Pixel saturation, specular reflections of skin etc. • (r) :The drop of GAR in case of proposed approach is earlier. • Indicates imposter pairs with increased similarity. • Reasons: Inherent in the algorithm.
Video Based Palmprint Recognition • Successive addition of Gabor responses. • Images shown after adding 2, 6 and 10 images respectively.
Conclusion/Observation • Proposed view invariant recognition system for Palmprint. • Very difficult to find point correspondences for palm. • Solution using point correspondence of stable and interest points. • RANSAC based Homography used to choose from approximate point correspondences. • Major role played by illumination variations and noise. • Video based palmprint recognition is a possible solution. • Future Work: To study the effects of video based palmprint recognition in further in more detail.