Earth science Rock cycle, Igneous rocks
630 likes | 972 Vues
Earth science Rock cycle, Igneous rocks. 6.1 The Rock Cycle. Rock- a group of minerals bound together in some way Can consist of one mineral, but usually multiple minerals Rocks form from other rocks This relationship is seen in the rock cycle (p 119). Types of Rocks.

Earth science Rock cycle, Igneous rocks
E N D
Presentation Transcript
6.1 The Rock Cycle Rock- a group of minerals bound together in some way • Can consist of one mineral, but usually multiple minerals • Rocks form from other rocks • This relationship is seen in the rock cycle (p 119)
Types of Rocks • Igneous- formed by the cooling and hardening of magma (hot molten rock) • Sedimentary- formed by the compaction and cementation of sediment (rock fragments, plant remains& minerals that have settled out of solution) • Metamorphic- formed from the effect of heat and pressure on preexisting rocks
6.2 Igneous Rocks • Categorized by composition, then texture • Texture is caused by cooling environment
Magma/ Rocks with Felsic Composition • Thick and slow moving magma • Cooler (though still very hot) • Large amounts of silica • Light colored rocks • Violent eruptions- builds up pressure • Mt. St. Helens (actually closer to intermediate, but close enough)
Magma/ Rocks with Mafic Composition • Thinner, faster moving magma • Hotter • Large amounts of Fe & Mg, little Si • Dark colored rocks (ferromagnesian silicates) • Calm eruptions- releases pressure often • Hawaii
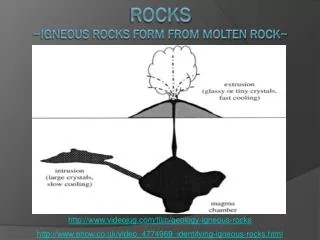
Textures- Extrusive (aka Volcanic) • Cools above the ground, very quickly • Small crystals, microscopic crystals or no crystallization (not crystalline is not a mineral, has glassy texture- obsidian) • Pumice is created when gas bubbles are “frozen” into quickly cooling rock
Texture: Intrusive (Plutonic) • Cools below the surface very slowly • Large crystals • Other texture: porphyry- cools below ground, then ejected and cools fast- has large crystals surrounded by small ones
Igneous Rock Families • By composition, members have differing textures • Granite family- felsic, fine grained is rhyolite, coarse is granite • Gabbro family- mafic, fine- basalt, coarse is gabbro • Diorite family- intermediate, fine- andesite, coarse- diorite • Ultramafic
Plutons (taken from 6.2) • A rock mass that forms when magma cools inside Earth’s interior • Batholith • Laccolith • Stock • Sill • Dike
6.3 Sedimentary Rocks • 3 main types of sedimentary rocks: • Clastic- formed from fragments of other rocks (sediment) • Chemical- Form when minerals precipitate (fall out) of solution • Organic- Forms from sediments consisting of the remains of plants and animals
Clastic Sedimentary Rocks • Sediment size (large to small): Boulder, Cobble, Pebbles, Gravel, Sand, Silt, Clay • Eroded and deposited by running water • Larger sizes are first to be deposited, near shore, smaller particles such as sand, silt and clay are deposited further off shore (p 127) • Once sediment is deposited it must be cemented
Cementation • Once sediment is deposited it must be cemented • Cementation- the binding of loose sediment by minerals filling the space between grains • Silica (SiO2), Calcite (CaCO3) and Iron oxide/ hematite can act as cements
Clastic Sedimentary Rocks • Conglomerate- rounded coarse sand and pebbles are cemented together • Breccia- similar to conglomerate, but particles are angular • Sandstone- sand is cemented • Shale- made of clay- often breaks in sheets
Chemical Sedimentary Rocks • Rock salt- halite • Rock gypsum • Limestone- can be any color, fine grained, calcite (will fizz in acid) • Dolostone- similar to limestone, but made of dolomite (will not fizz in acid)
Organic Sedimentary Rocks • Bituminous coal- plant remains • Limestone- formed from the shells of clams, corals and some algae (calcite was taken from chemical limestone) a. chalk b. coquina- made completely of shells
Sedimentary Rock Features • Stratification- arrangement of layers of different sediment • Bedding plane-plane between layers, usually horizontal, but sometimes cross bedding occurs • Fossils- the remains, impression or any other evidence of a plant preserved in rock • Ripple marks- sand patterns due to wind, wave, stream or current action
Sedimentary Rock Features 5. Mud cracks- form when mud dries 6. Nodules- lumps of silica in limestones 7. Concretion- lump of calcite in shale 8. Geodes- hallow lumps of silica in limestone, often have crystals inside