Improved Localization for Home Robots: Monte Carlo Approach to Odometry Errors and Recovery
Home robots often face the challenge of losing their position due to odometry errors or external movements. Our innovative ApriAttenda™ method utilizes a Modified Monte Carlo Approach to enable robots to correct positional information when relocating and recover from total disorientation. By effectively determining robot position on a 16m by 8m map in as little as 20 seconds, this solution addresses the fundamental localization issues required for autonomous navigation. Our approach outperforms traditional Kalman filters and grid-based localization by minimizing computational overhead and utilizing distance variance for enhanced performance.

Improved Localization for Home Robots: Monte Carlo Approach to Odometry Errors and Recovery
E N D
Presentation Transcript
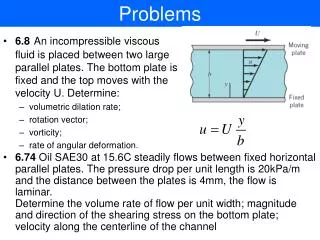
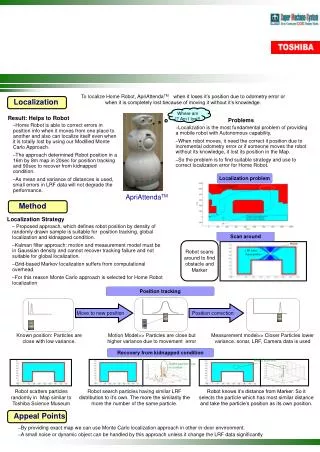
Method Appeal Points Localization To localize Home Robot, ApriAttendaTM when it loses it’s position due to odometry error or when it is completely lost because of moving it without it’s knowledge. Where am I? Am I lost!! • Result: Helps to Robot • Home Robot is able to correct errors in position info when it moves from one place to another and also can localizeitself even when it is totally lost by using our Modified Monte Carlo Approach. • The approach determined Robot position in a 16m by 8m map in 20sec for position tracking and 90sec to recover from kidnapped condition. • As mean and variance of distances is used, small errors in LRF data will not degrade the performance. • Problems • Localization is the most fundamental problem of providing a mobile robot with Autonomous capability. • When robot moves, it need the correct it position due to incremental odometry error or if someone moves the robot without its knowledge, it lost its position in the Map. • So the problem is to find suitable strategy and use to correct localization error for Home Robot. Localization problem ApriAttendaTM • Localization Strategy • Proposed approach, which defines robot position by density of randomly drawn sample is suitable for position tracking, global localization and kidnapped condition. • Kalman filter approach: motion and measurement model must be in Gaussian density and cannot recover tracking failure and not suitable for global localization. • Grid-based Markov localization suffers from computational overhead. • For this reason Monte Carlo approach is selected for Home Robot localization Scan around Robot scans around to find obstacle and Marker Marker LRF Lines Robot position Position tracking Move to new position Position correction Known position: Particles are close with low variance. Motion Model>> Particles are close but higher variance due to movement error Measurement model>> Closer Particles lower variance. sonar, LRF, Camera data is used Recovery from kidnapped condition Robot position Same particle more in number Robot scatters particles randomly in Map similar to Toshiba Science Museum Robot search particles having similar LRF distribution to it’s own. The more the similarity the more the number of the same particle. Robot knows it’s distance from Marker. So it selects the particle which has most similar distance and take the particle’s position as its own position. • By providing exact map we can use Monte Carlo localization approach in other in-door environment. • A small noise or dynamic object can be handled by this approach unless it change the LRF data significantly